Soft Inflatable Robotic Systems for Space Applications: A Survey
Abstract
Soft inflatable robotic systems and structures are emerging as transformative technologies for space applications, offering compelling advantages in mass efficiency, compact stowage, compliance, and adaptability over traditional rigid-body systems. This survey provides a comprehensive review of the intersection of soft robotics, inflatable structures, and space engineering, organised around a unifying thesis: the same high-strength fabric technologies (Vectran, Kevlar, Nextel) that enable inflatable habitats also enable compliant debris capture mechanisms and large deployable shields. We examine two primary application domains---active debris removal, where soft compliant systems address the fragmentation paradox inherent in rigid capture, and space exploration, where inflatable habitats offer order-of-magnitude mass efficiency improvements over metallic modules. Eight enabling technology areas are reviewed: materials and structures, deployment mechanics, actuation, sensing and structural health monitoring, power systems, thermal management, attitude and orbit control, and robotic in-orbit assembly. We identify five critical research gaps, including the absence of quantitative soft-versus-rigid fragmentation comparisons, the lack of flight heritage for soft robotic capture, and the unexplored rigid-to-flexible assembly interface. A research roadmap spanning 5-year and 15-year horizons is proposed, with the most flight-ready near-term demonstrator identified as a gecko-adhesive gripper on an inflatable arm with fibre Bragg grating structural health monitoring. This survey differentiates itself from prior reviews in Progress in Aerospace Sciences by focusing specifically on soft and inflatable systems---a technology class not covered by existing reviews of rigid space robotics or contact/contactless debris removal.
Full Text
Soft Inflatable Robotic Systems for Space Applications: 1
A Survey 2
3
Abstract 4
Soft inflatable robotic systems and structures are emerging as transformative tech- 5
nologies for space applications, offering compelling advantages in mass efficiency, com- 6
pact stowage, compliance, and adaptability over traditional rigid-body systems. This 7
survey provides a comprehensive review of the intersection of soft robotics, inflatable 8
structures, and space engineering, organised around a unifying thesis: the same high- 9
strength fabric technologies (Vectran, Kevlar, Nextel) that enable inflatable habitats 10
also enable compliant debris capture mechanisms and large deployable shields. We ex- 11
amine two primary application domains—active debris removal, where soft compliant 12
systems address the fragmentation paradox inherent in rigid capture, and space explo- 13
ration, where inflatable habitats offer order-of-magnitude mass efficiency improvements 14
over metallic modules. Eight enabling technology areas are reviewed: materials and 15
structures, deployment mechanics, actuation, sensing and structural health monitoring, 16
power systems, thermal management, attitude and orbit control, and robotic in-orbit 17
assembly. We identify five critical research gaps, including the absence of quantitative 18
soft-versus-rigid fragmentation comparisons, the lack of flight heritage for soft robotic 19
capture, and the unexplored rigid-to-flexible assembly interface. A research roadmap 20
spanning 5-year and 15-year horizons is proposed, with the most flight-ready near-term 21
demonstrator identified as a gecko-adhesive gripper on an inflatable arm with fibre 22
Bragg grating structural health monitoring. This survey differentiates itself from prior 23
reviews in Progress in Aerospace Sciences by focusing specifically on soft and inflatable 24
systems—a technology class not covered by existing reviews of rigid space robotics or 25
contact/contactless debris removal. 26
Contents 27
1 Introduction 4 28
2 The Case for Soft Inflatables in Space 8 29
2.1 Space Debris Crisis and the Need for Active Removal . . . . . . . . . . . . . 8 30
2.2 Human Exploration Beyond LEO: The Habitat Challenge . . . . . . . . . . . 10 31
2.3 Unifying Thesis: Shared Fabric Technology Across Applications . . . . . . . 12 32
3 Use Cases: Active Debris Removal 14 33
3.1 Rigid Capture Approaches and Fragmentation Risk . . . . . . . . . . . . . . 15 34
3.1.1 The Fragmentation Paradox . . . . . . . . . . . . . . . . . . . . . . . 16 35
3.2 Soft and Compliant Capture Mechanisms . . . . . . . . . . . . . . . . . . . . 17 36
3.2.1 Gecko-Inspired Dry Adhesive Grippers . . . . . . . . . . . . . . . . . 17 37
3.2.2 Dielectric Elastomer Minimum Energy Structure (DEMES) Grippers 19 38
3.2.3 Bistable and Passive Capture Grippers . . . . . . . . . . . . . . . . . 19 39
3.2.4 Thermally Qualified Soft Grippers . . . . . . . . . . . . . . . . . . . . 19 40
3.2.5 Inflatable Robotic Arms for Capture . . . . . . . . . . . . . . . . . . 20 41
3.2.6 INSIDeR: Net Capture with Inflatable Deployment . . . . . . . . . . 20 42
3.3 Inflatable Debris Shields . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21 43
4 Use Cases: Habitats and Exploration 23 44
4.1 Heritage Timeline: Echo to BEAM . . . . . . . . . . . . . . . . . . . . . . . 24 45
4.1.1 Early Inflatables: Echo and Volga (1960–1965) . . . . . . . . . . . . . 24 46
4.1.2 TransHab: Proving the Five-Layer Architecture (1997–2000) . . . . . 25 47
4.1.3 Genesis and BEAM: Orbital Validation (2006–2016+) . . . . . . . . . 26 48
4.2 Current Commercial Programs: LIFE, Orbital Reef, and Beyond . . . . . . . 27 49
4.2.1 Sierra Space LIFE . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27 50
4.2.2 Historical Context: B330 and Commercial Ecosystem Fragility . . . . 27 51
4.2.3 NextSTEP Competitive Landscape . . . . . . . . . . . . . . . . . . . 27 52
4.3 Future Concepts: Lunar Surface, Mars Transit, Planetary Entry . . . . . . . 28 53
4.3.1 Lunar Surface Habitats . . . . . . . . . . . . . . . . . . . . . . . . . . 28 54
4.3.2 Mars Transit and Surface Applications . . . . . . . . . . . . . . . . . 28 55
4.3.3 European Programmes . . . . . . . . . . . . . . . . . . . . . . . . . . 29 56
4.4 Radiation Shielding: The BEAM SPE Findings and Design Implications . . 29 57
5 State of the Art: Materials and Structures 30 58
5.1 Space-Rated Fabrics: Vectran, Kevlar, Zylon, Nextel . . . . . . . . . . . . . 30 59
5.2 Multi-Layer Shell Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . 33 60
5.3 Rigidization Technologies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35 61
5.4 Environmental Degradation: AO, UV, Radiation, Creep . . . . . . . . . . . . 36 62
6 State of the Art: Deployment Mechanics 37 63
6.1 Fold Patterns and Packaging Efficiency . . . . . . . . . . . . . . . . . . . . . 37 64
6.2 Inflation Sequencing and Control . . . . . . . . . . . . . . . . . . . . . . . . 38 65
6.3 Flight Heritage: InflateSail, LOFTID, BEAM Deployment Lessons . . . . . . 39 66
6.4 Comparison with Rigid Deployable Alternatives . . . . . . . . . . . . . . . . 40 67
7 State of the Art: Actuation for Soft Space Systems 41 68
7.1 Dielectric Elastomer Actuators and DEMES . . . . . . . . . . . . . . . . . . 41 69
7.2 Vacuum-Gap Electrostatic Actuators: Vacuum as Enabler . . . . . . . . . . 42 70
7.3 Ionic Electroactive Polymers: Space Tolerance Assessment . . . . . . . . . . 42 71
7.4 Tendon-Driven Continuum Manipulators . . . . . . . . . . . . . . . . . . . . 44 72
7.5 Shape Memory Alloys for Deployment . . . . . . . . . . . . . . . . . . . . . 44 73
7.6 Jamming in Vacuum: A Novel Opportunity . . . . . . . . . . . . . . . . . . 44 74
7.7 Sealed Pneumatic Actuation in Space . . . . . . . . . . . . . . . . . . . . . . 46 75
7.8 Electroadhesion and Magnetic Actuation: Emerging Approaches . . . . . . . 46 76
8 State of the Art: Sensing and Structural Health Monitoring 48 77
8.1 Fibre Bragg Grating Sensors: From Proba-2 to Inflatable Webbing . . . . . . 48 78
8.2 Multicore Fibre Optic Shape Sensing . . . . . . . . . . . . . . . . . . . . . . 49 79
8.3 Capacitive, Resistive, and Alternative Soft Sensors . . . . . . . . . . . . . . . 50 80
8.4 Distributed Fibre Optic Sensing: Rayleigh and Brillouin Scattering . . . . . 51 81
8.5 Distributed Impact Detection . . . . . . . . . . . . . . . . . . . . . . . . . . 52 82
9 State of the Art: Power Systems for Large Inflatables 52 83
9.1 Flexible Solar Array Landscape: ROSA to Perovskite . . . . . . . . . . . . . 52 84
9.2 The Inflatable-Power Integration Gap: PowerSphere and Beyond . . . . . . . 53 85
9.3 Energy Storage: Li-ion, RFC, and Mission-Dependent Selection . . . . . . . 55 86
10 State of the Art: Thermal Management 56 87
10.1 Multi-Layer Insulation for Inflatable Shells . . . . . . . . . . . . . . . . . . . 56 88
10.2 The JWST Sunshield as Deployable Thermal Barrier Precedent . . . . . . . 57 89
10.3 Variable Emissivity Coatings and Smart Radiators . . . . . . . . . . . . . . . 58 90
10.4 Loop Heat Pipes for Deployed Structures . . . . . . . . . . . . . . . . . . . . 59 91
10.5 Phase Change Materials in Fabric Layers: The TRL 2–3 Gap . . . . . . . . . 60 92
11 State of the Art: Attitude and Orbit Control 61 93
11.1 Control-Structure Interaction for Flexible Spacecraft . . . . . . . . . . . . . 61 94
11.2 Gyroelastic Body Theory and Distributed Momentum Management . . . . . 61 95
11.3 Drag Budget for 100 m-Class LEO Structures . . . . . . . . . . . . . . . . . 62 96
11.4 The Missing Theory: AOCS for Pressure-Stabilised Membranes . . . . . . . 64 97
12 State of the Art: Robotic In-Orbit Assembly 66 98
12.1 Assembly Robot Heritage and Current Programmes . . . . . . . . . . . . . . 66 99
12.2 Walking Robots for Large Structure Assembly: E-Walker . . . . . . . . . . . 67 100
12.3 The Rigid-to-Flexible Interface Gap . . . . . . . . . . . . . . . . . . . . . . . 67 101
12.4 Assembly-Enabled Inflatable Platforms: Design Requirements . . . . . . . . 68 102
13 Challenges, Open Questions, and Research Roadmap 69 103
13.1 Critical Research Gaps . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69 104
13.2 Integration Challenges at System Level . . . . . . . . . . . . . . . . . . . . . 71 105
13.3 Proposed Research Roadmap: 5-Year and 15-Year Horizons . . . . . . . . . . 74 106
13.4 The Path to Flight Demonstration . . . . . . . . . . . . . . . . . . . . . . . 77 107
14 Conclusions 78 108
1 Introduction 109
Two converging pressures threaten humanity’s long-term access to and presence in space. 110
The first is the accelerating degradation of the orbital environment: the low Earth orbit 111
(LEO) regime is increasingly populated with debris that endangers operational satellites, 112
whose services — from climate monitoring to navigation — underpin the global economy. 113
The second is the ambition for sustained human exploration beyond LEO, which demands 114
habitable volumes an order of magnitude larger than current metallic modules allow within 115
existing launch vehicle constraints. This survey argues that a single technology class — 116
soft inflatable robotic systems based on high-strength technical fabrics — offers a coherent 117
engineering response to both challenges through a shared material and structural foundation. 118
The orbital debris environment has reached a critical threshold. The European Space 119
Agency’s 2025 Space Environment Report records approximately 44,870 tracked objects, 120
with an estimated 54,000 objects larger than 10 cm, some 1.2 million objects between 1 and 121
10 cm, and an estimated 140 million fragments between 1 mm and 1 cm, totalling roughly 122
15,800 tonnes of mass in orbit ESA Space Debris Office [2025]. The consequence is oper- 123
ational: SpaceX’s Starlink constellation executed 144,404 collision avoidance manoeuvres 124
in the first half of 2025 alone, a 65-fold increase relative to 2021 ESA Space Debris Office 125
[2025]. Kessler and Cour-Palais identified in 1978 that mutual collision among catalogued 126
objects could generate a self-sustaining fragment cascade Kessler and Cour-Palais [1978], 127
and Liou and Johnson subsequently demonstrated with the LEGEND simulation suite that 128
the current LEO population is already gravitationally unstable: even with a complete halt to 129
new launches, the debris environment continues to grow through inter-object collisions Liou 130
and Johnson [2006, 2008]. Stabilising LEO requires the active removal of at least five large, 131
rocket-body-class objects per year from the most critical orbital shells Liou et al. [2010]. 132
Active Debris Removal (ADR) therefore transitions from a conceptual aspiration to an 133
operational necessity. Yet the dominant design paradigm — rigid robotic arms similar to 134
ClearSpace-1’s four-arm capturing system — carries an ironic risk: forceful contact with a 135
tumbling, uncooperative object can fracture it, generating new fragments faster than they 136
are removed. Simulation studies and ground tests indicate that peak joint torques of order 137
195 Nm can arise during ENVISAT-class capture operations Ledkov and Aslanov [2022], 138
and the RemoveDebris harpoon demonstration saw a carbon-fibre boom snap on contact at 139
20 m/s Aglietti et al. [2020]. The fragmentation paradox — rigid capture risks accelerating 140
the very cascade it aims to halt — provides the primary motivation for compliant, soft 141
capture architectures. 142
Simultaneously, the ambition to sustain human presence beyond LEO confronts a fun- 143
damental mass budget constraint. Metallic pressurised modules — Columbus (137 kg/m3) 144
and Tranquility (205 kg/m3) — are delivered at densities an order of magnitude higher than 145
fabric-based alternatives such as the TransHab concept (39 kg/m3) Valle et al. [2019a]. Vec- 146
tran high-tenacity yarn achieves a specific strength of 2,330 kN-m/kg, versus 220 kN-m/kg 147
for Ti-6Al-4V Valle et al. [2019a] — a 10× advantage that directly translates to launch mass 148
savings. The Bigelow Expandable Activity Module (BEAM), attached to the International 149
Space Station (ISS) since 2016, has accumulated more than eight years of continuous pres- 150
surised operation on the ISS, with periodic crew access for inspection and cargo storage, at 151
Technology Readiness Level (TRL) 9 NASA Johnson Space Center [2017]. 152
The organising thesis of this survey is that the same high-strength fabric technology 153
— Vectran restraint layers, Kevlar/Nextel debris shielding, Kapton thermal insulation — 154
that enables BEAM’s pressure vessel integrity also enables compliant robotic capture arms, 155
large deployable debris shields, and the next generation of deep-space habitats. Material 156
qualification campaigns, manufacturing processes, and design heritage are shared across 157
these application domains, providing an unusually coherent pathway from current flight- 158
proven technology to future operational systems. 159
Scope and Organisation 160
This survey reviews the intersection of three mature fields: soft robotics, inflatable space 161
structures, and the enabling subsystem technologies (materials, power, thermal manage- 162
ment, attitude and orbit control, and robotic assembly) that together determine whether 163
soft inflatable systems can be realised at mission-operational scale. The scope spans two 164
primary application domains: 165
1. Active Debris Removal — soft and compliant capture mechanisms (TRL 2–5) and 166
large inflatable debris shields (design stage), examined against the rigid-capture base- 167
line. 168
2. Human Space Exploration — the heritage from Echo 1 (1960) through BEAM 169
(2016+) to current commercial programmes (Sierra Space LIFE, Orbital Reef), and 170
future concepts for lunar surface, Mars transit, and planetary entry decelerators. 171
Eight enabling technology areas are reviewed in depth: (1) materials and structures, 172
(2) deployment mechanics, (3) actuation, (4) sensing and structural health monitoring, 173
(5) power systems, (6) thermal management, (7) attitude and orbit control, and (8) robotic 174
in-orbit assembly. The survey concludes with a consolidated gap analysis and a research 175
roadmap spanning 5-year and 15-year horizons. 176
Relationship to Existing Reviews 177
Three prior surveys in Progress in Aerospace Sciences address adjacent territory, and this 178
survey is positioned explicitly as their complement (Table 1). Flores-Abad et al. reviewed the 179
state of space robotics for on-orbit servicing in 2014 Flores-Abad et al. [2014], establishing 180
the four-phase capture framework (approach, tracking, capture, post-capture stabilisation) 181
that remains the standard reference; however, that work predates the current wave of soft 182
robotics innovation and does not address inflatable structures. Ledkov and Aslanov surveyed 183
contact and contactless ADR approaches in 2022 Ledkov and Aslanov [2022], providing com- 184
prehensive coverage of nets, harpoons, ion beam shepherds, and electrodynamic tethers, but 185
soft and compliant capture mechanisms receive minimal treatment and inflatable structures 186
for ADR are absent. Rybus reviewed rigid robotic manipulators for in-orbit servicing and 187
ADR in 2024 Rybus [2024], covering Denavit-Hartenberg kinematics, impedance control, and 188
comparative arm performance; soft and inflatable manipulators are outside scope. 189
The most relevant prior survey is Zhang et al. (2023), who examined soft robotics for 190
space across actuation, sensing, and manipulation Zhang et al. [2023a]. That work identifies 191
vacuum as a challenge for pneumatic actuation and catalogues the soft gripper landscape; 192
however, it does not cover the inflatable structure platform on which soft robots operate, nor 193
the enabling subsystems (power, thermal, AOCS, assembly) necessary for mission viability, 194
nor the dual ADR-and-exploration organising principle developed here. 195
The unique contribution of this survey is threefold. First, it covers eight enabling tech- 196
nology areas through a single integrative lens, rather than the one or two areas addressed 197
by prior reviews. Second, it presents the first unified treatment of both ADR and explo- 198
ration applications as manifestations of the same fabric-based technology class. Third, it 199
maps cross-domain connections — between, for example, thermal management and actuator 200
design, or fold patterns and debris protection — that can only be identified from a broad 201
survey perspective. 202
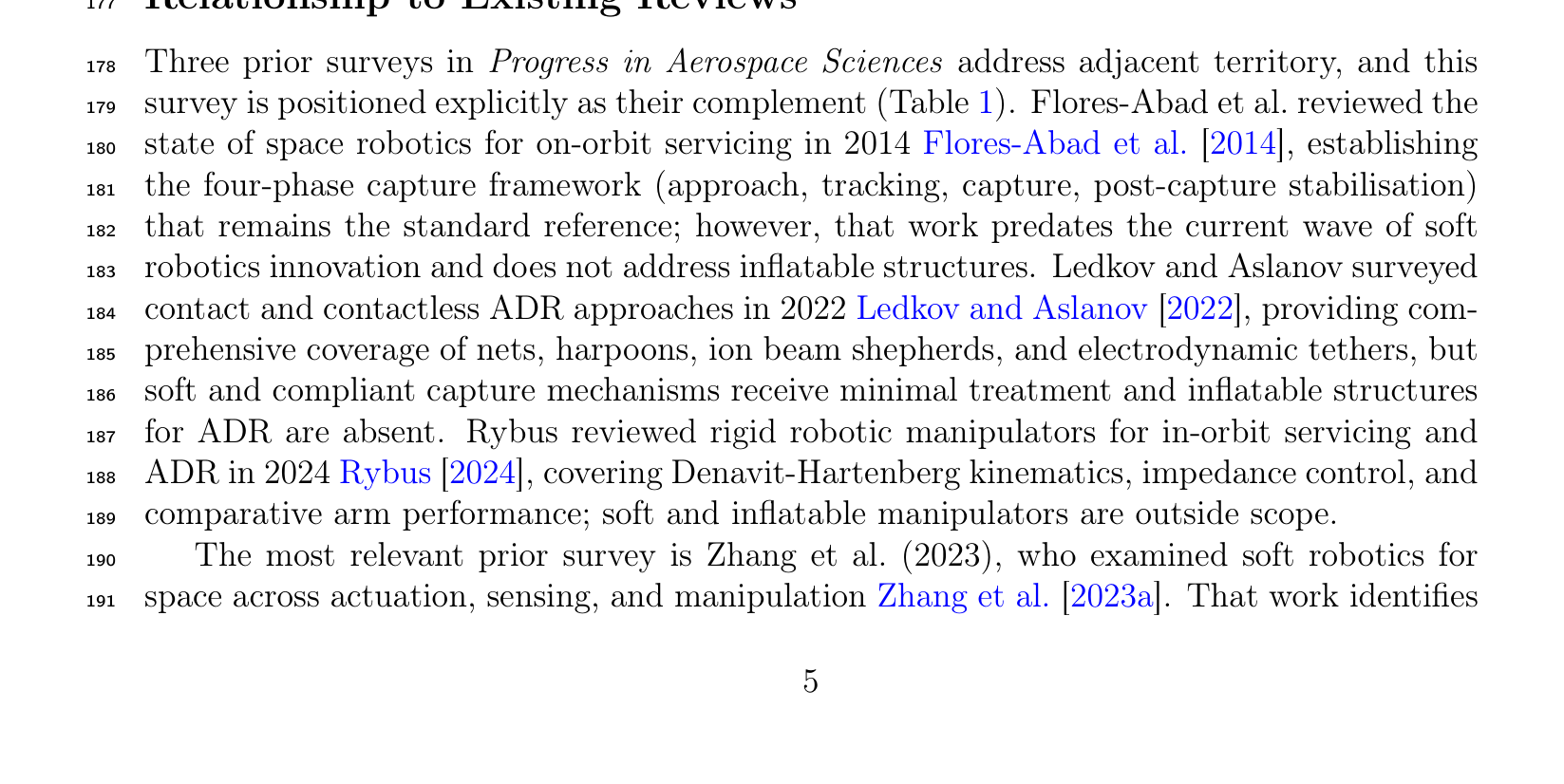
Table 1: Comparison of this survey with prior reviews in Progress in Aerospace Sciences covering adjacent domains. ✓= covered; – = not covered; ∼= partial coverage.
Topic This survey Rybus 2024 Ledkov 2022 Flores-Abad 2014
Soft/compliant capture ✓ – ∼ – Inflatable robotic arms ✓ – – – Inflatable debris shields ✓ – – – Inflatable habitats ✓ – – – Rigid ADR approaches ∼ ✓ ✓ ✓ Rigid manipulators ∼ ✓ ∼ ✓ Materials & fabrics ✓ – – – Power systems ✓ – – – Thermal management ✓ – – – AOCS for large structures ✓ – – – Robotic in-orbit assembly ✓ ∼ – ∼ Sensing & SHM ✓ – – – Deployment mechanics ✓ – – –
Year 2026 2024 2022 2014 Soft/inflatable focus Primary None Minimal None
The Paradigm Shift: Vacuum as Design Resource 203
A recurring theme throughout this survey is the inversion of the conventional assumption 204
that space vacuum is hostile to soft robotic systems. Three independent developments chal- 205
lenge this assumption. First, Sirbu et al. demonstrated vacuum-gap electrostatic multilayer 206
actuators in 2025 that require vacuum to function: thin-film polymer multilayers with inter- 207
nal vacuum gaps zip closed on electrical activation, producing forces exceeding 4 N from a 208
0.7 g actuator at bandwidths above 100 Hz Sîrbu et al. [2025]. On Earth, a vacuum pump 209
would be required to create this operating condition; in space, the environment provides it 210
at no mass or power cost. Second, the confining pressure for granular and layer jamming — 211
which terrestrially requires evacuating a sealed membrane with a pump — is provided for 212
free by the ambient vacuum differential against a pressurised inflatable interior Fitzgerald 213
et al. [2020]. Third, DEMES gripper geometry provides a passive negative feedback loop 214
in microgravity: grip force increases as a floating target drifts away from the actuator tip, 215
offering passive capture stability without active control — a property that is useful only in 216
the microgravity environment Araromi et al. [2015]. 217
These developments suggest that soft inflatable robotic systems are not merely terrestrial 218
technology adapted for space, but a distinct engineering discipline with unique environment- 219
enabled advantages. 220
Review Methodology 221
The literature for this survey was assembled through a structured search strategy span- 222
ning multiple databases and source types. Primary databases searched include Scopus, 223
Web of Science, NASA Technical Reports Server (NTRS), ESA’s publication repository, and 224
Google Scholar, using the following search term families: (i) “inflatable space structure” 225
OR “expandable habitat” OR “deployable membrane”; (ii) “soft robot*” AND “space” OR 226
“orbital”; (iii) “active debris removal” AND (“compliant” OR “soft” OR “inflatable”); and 227
(iv) technology-specific terms for each of the eight enabling areas (e.g., “dielectric elastomer 228
actuator space,” “fibre Bragg grating spacecraft,” “perovskite solar cell radiation”). The tem- 229
poral scope spans 1960 (Project Echo) to early 2026, with no lower date restriction applied. 230
Inclusion criteria required that sources address at least one of the two application domains 231
(ADR or exploration) or one of the eight enabling technology areas in a space-relevant con- 232
text. Conference proceedings were included when they represented the primary publication 233
venue for mission results (e.g., AIAA, IAC, IEEE Aerospace). NASA technical memoranda, 234
ESA reports, and agency mission documentation were included for heritage programme data 235
not available in peer-reviewed form. Corporate press releases and datasheets were included 236
only when no peer-reviewed alternative existed for specific mission or material property 237
data. The eight technology areas were selected based on a preliminary scoping review that 238
identified all subsystem-level capabilities required for an operational soft inflatable robotic 239
system at mission scale, following the principle that reviews in Progress in Aerospace Sci- 240
ences should enable the reader to assess system-level feasibility rather than component-level 241
performance alone. TRL assessments throughout the paper follow the NASA NPR 7123.1B 242
standard definitions NASA [2020]. 243
Survey Statistics 244
This survey reviews approximately 120 primary sources spanning the period from 1960 to 245
2026. Of these, approximately 74% are peer-reviewed journal papers or conference pro- 246
ceedings from indexed venues; the remainder comprises NASA technical memoranda, ESA 247
reports, and agency mission documentation. Coverage extends across eight technology areas 248
and two application domains, with the deepest literature pools in actuation (Zhang 2023 and 249
its references), inflatable habitats (Litteken 2019 and the TransHab programme), and space 250
debris (Kessler 1978 through ESA 2025). The survey is organised with application use cases 251
preceding the technology state-of-the-art review, following the principle that applications 252
should motivate the technology landscape rather than the reverse. 253
2 The Case for Soft Inflatables in Space 254
2.1 Space Debris Crisis and the Need for Active Removal 255
The accumulation of orbital debris is the defining environmental challenge of the space 256
age. Since Sputnik-1’s launch in 1957, every mission has contributed to a growing cloud of 257
defunct satellites, spent rocket stages, and collision fragments. The debris environment is 258
now characterised not merely by nuisance but by irreversible instability. 259
Current Debris Environment 260
The ESA Space Environment Report for 2025 provides the most current comprehensive 261
characterisation ESA Space Debris Office [2025]. As of early 2026, approximately 44,870 262
objects are tracked by ground-based surveillance networks, of which roughly one third are 263
operational satellites and two thirds are debris. The total catalogued population has grown 264
by more than 3,000 objects from fragmentation events in 2024 alone. At altitudes between 265
500 and 700 km — where ADR missions are most urgently needed — debris density is 266
comparable to or exceeds the density of active satellites. 267
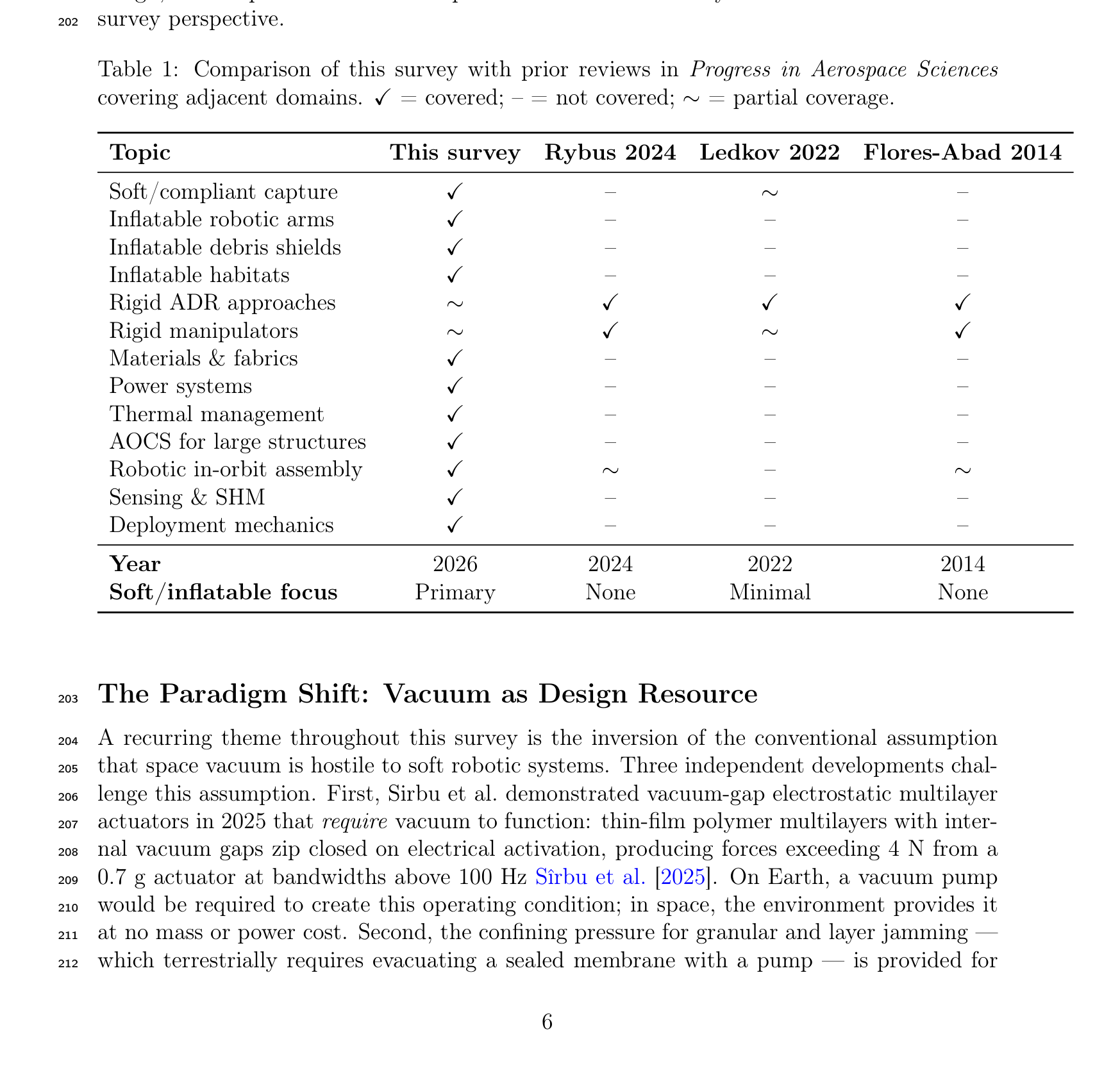
Table 2: Current LEO debris population by size category (data from ESA Space Environment Report 2025 ESA Space Debris Office [2025]).
Size category Estimated count Trackable? Primary threat
> 10 cm ∼54,000 Yes (radar) Catastrophic collision 1–10 cm ∼1,200,000 No Mission-ending damage 1 mm – 1 cm ∼140,000,000 No Surface/solar panel damage < 1 mm > 1012 No Erosion/coating damage
Total mass ∼15,800 tonnes – –
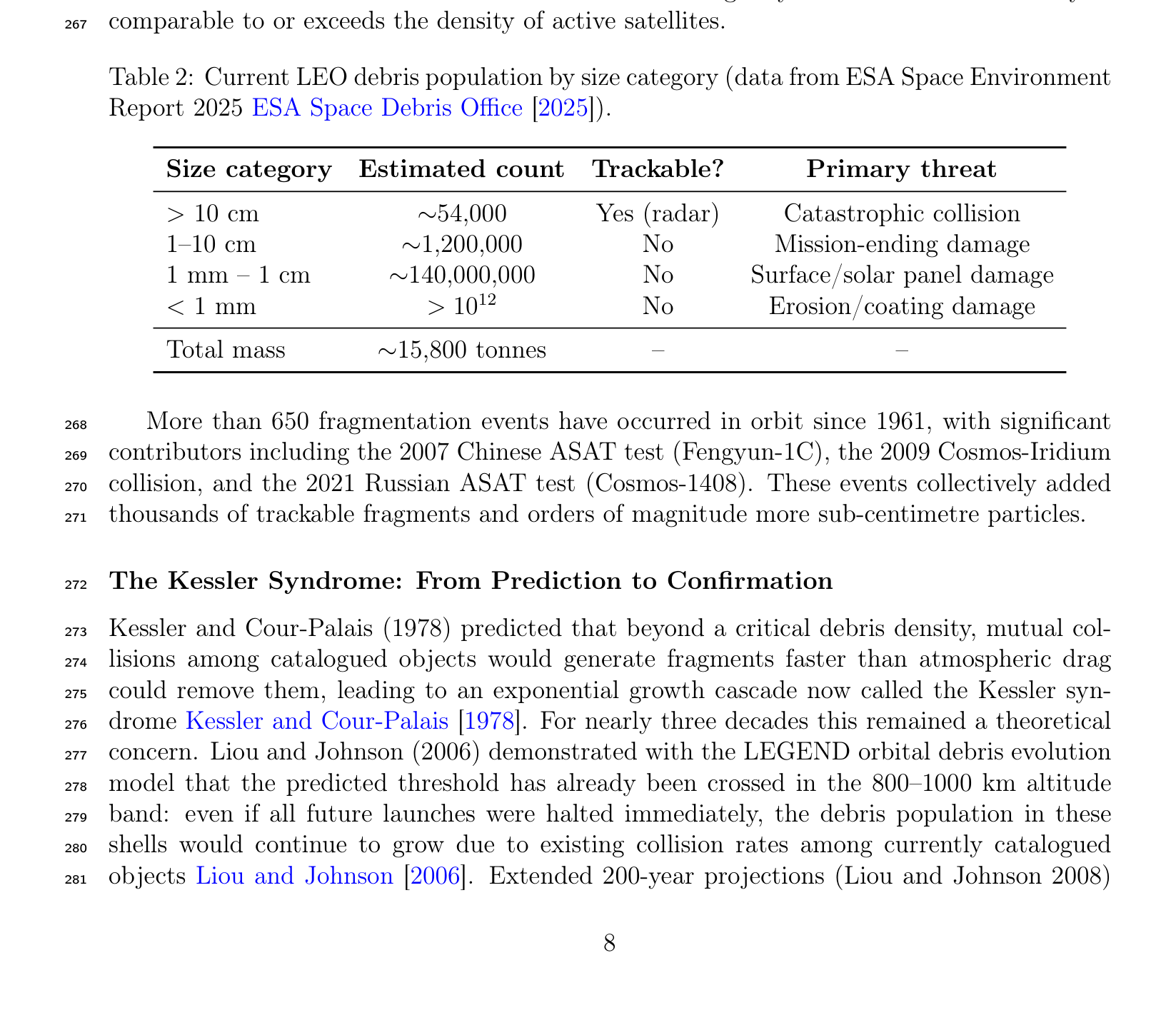
More than 650 fragmentation events have occurred in orbit since 1961, with significant 268
contributors including the 2007 Chinese ASAT test (Fengyun-1C), the 2009 Cosmos-Iridium 269
collision, and the 2021 Russian ASAT test (Cosmos-1408). These events collectively added 270
thousands of trackable fragments and orders of magnitude more sub-centimetre particles. 271
The Kessler Syndrome: From Prediction to Confirmation 272
Kessler and Cour-Palais (1978) predicted that beyond a critical debris density, mutual col- 273
lisions among catalogued objects would generate fragments faster than atmospheric drag 274
could remove them, leading to an exponential growth cascade now called the Kessler syn- 275
drome Kessler and Cour-Palais [1978]. For nearly three decades this remained a theoretical 276
concern. Liou and Johnson (2006) demonstrated with the LEGEND orbital debris evolution 277
model that the predicted threshold has already been crossed in the 800–1000 km altitude 278
band: even if all future launches were halted immediately, the debris population in these 279
shells would continue to grow due to existing collision rates among currently catalogued 280
objects Liou and Johnson [2006]. Extended 200-year projections (Liou and Johnson 2008) 281
Projected (no ADR)
Projected (5 ADR/yr)
70,000
Number of catalogued objects in orbit
60,000
Mega-constellation
50,000
era begins Kessler & Cour-Palais (1978) prediction
40,000
ESA 2025: 44,870 tracked (∼54,000 est. >10 cm)
India ASAT (Mission Shakti)
30,000
China ASAT (Fengyun-1C)
20,000
10,000
Cosmos–Iridium
collision
0
1960 1970 1980 1990 2000 2010 2020 2030 2040 Year
Figure 1: Growth of the catalogued orbital debris population from 1960 to 2025, with projec- tions to 2040. Discrete fragmentation events (Chinese ASAT 2007, Cosmos-Iridium collision 2009) are visible as step increases. Red dashed line: projected growth without active de- bris removal. Green dashed line: projected stabilisation with five large-object removals per year Liou et al. [2010]. Data from ESA Space Environment Report 2025 ESA Space Debris Office [2025].
confirmed that the instability is neither transient nor recoverable without active interven- 282
tion Liou and Johnson [2008]. 283
The required rate of removal has been quantified. Liou et al. (2010) showed that removing 284
at least five large objects per year (primarily rocket bodies in the 800–1000 km band) is nec- 285
essary and sufficient to stabilise the LEO population over a 200-year projection horizon Liou 286
et al. [2010]. This represents an annual ADR cadence comparable to the total number of sig- 287
nificant deorbit missions conducted globally over the past decade — a formidable operational 288
challenge. 289
The Fragmentation Paradox 290
The dominant design approach to ADR — rigid robotic arms, exemplified by ESA’s ClearSpace- 291
1 mission targeting the PROBA-1 satellite — faces a fundamental tension. Rigid contact 292
with a non-cooperative, tumbling debris object generates impulsive forces at the contact 293
interface. For an 8-tonne ENVISAT-class object rotating at 5 deg/s, e.deorbit trajectory 294
analyses reveal peak joint torques of 195 Nm at structural limits Ledkov and Aslanov [2022], 295
while experimental harpoon tests in the RemoveDebris mission saw a carbon-fibre deploy- 296
able boom snap on contact with the capture target at 20 m/s Aglietti et al. [2020]. Arshad 297
et al. (2025) note explicitly that rigid grippers have “the potential to generate fragments 298
during the capturing phase” Arshad et al. [2025], and Chen et al. (2024) characterise single 299
contact-based caging approaches as “excessively risky for fast-tumbling targets” Chen et al. 300
[2024]. 301
This fragmentation paradox is quantifiable, but the relevant mechanism depends on target 302
scale. The NASA/ESA IMPACT model identifies a catastrophic fragmentation threshold of 303
10 J/g of specific energy at the contact interface Liou and Johnson [2006]. For small debris, 304
total rotational kinetic energy is often modest: a 100-kg object with characteristic radius 305
2Iω2 ≈0.095 J. For an 306
0.5 m has I ≈25 kg·m2, and ω = 5 deg/s = 0.0873 rad/s gives 1
ENVISAT-class 8-tonne target, however, I ≈1.7 × 104 kg·m2 at the same angular rate gives 307
1 2Iω2 ≈65 J, so concentrated energy absorption by gram-scale appendage hardware can 308
become physically meaningful. For sub-tonne targets, rigid-capture fragmentation risk is 309
therefore dominated less by total rotational energy than by impulsive contact stress applied 310
to degraded appendages and thin-walled structures. No published paper has conducted a 311
systematic quantitative comparison of fragment generation probability between rigid and 312
compliant capture mechanisms — this gap is identified as a priority experimental question 313
in Section 13. 314
Compliant and soft capture systems address the paradox by absorbing and redistributing 315
contact energy rather than transmitting impulsive forces. Eight distinct soft and compliant 316
capture approaches are reviewed in Section 3, ranging from gecko-inspired dry adhesives 317
(microgravity-validated at TRL 4–5 Jiang et al. [2017]) to DEMES grippers with mission 318
heritage on CleanSpace One Araromi et al. [2015] and inflatable robotic arms Palmieri et al. 319
[2023]. None has yet demonstrated in-flight capture, establishing a clear technology gap that 320
motivates the investment in flight demonstration infrastructure discussed in Section 13. 321
Operational Consequences 322
The operational burden of the debris environment is no longer theoretical. At 550 km altitude 323
— the operating shell of many Starlink satellites — the trackable debris density is sufficient 324
to require avoidance manoeuvres at a rate that consumes propellant reserves and interrupts 325
normal operations. Starlink’s 144,404 avoidance manoeuvres in H1 2025 (65-fold increase 326
from 2021 ESA Space Debris Office [2025]) represent a structural operational cost that scales 327
with constellation size. ESA’s own operational satellites execute hundreds of manoeuvres 328
annually, with collision avoidance emerging as a primary mission-operations driver. The 329
economic externality — uncontrolled debris imposes avoidance costs on all operators — 330
provides a market-failure argument for policy-mandated ADR that is increasingly reflected 331
in international guidelines Liou et al. [2010]. 332
2.2 Human Exploration Beyond LEO: The Habitat Challenge 333
The second driver for soft inflatable systems is the ambition for sustained human presence 334
beyond the ISS. NASA’s Artemis programme, ESA’s Moon Village concept, and private 335
ventures such as Orbital Reef collectively assume that humans will occupy permanent or 336
semi-permanent outposts in cislunar space, on the lunar surface, in Mars transit, and even- 337
tually on the Martian surface. All of these scenarios require pressurised habitable volumes 338
substantially larger than any single rigid module that can be launched within existing fairing 339
constraints. 340
The Mass and Volume Efficiency Argument 341
Valle et al. (2019) provide the definitive comparative analysis of inflatable versus metallic 342
pressurised structures Valle et al. [2019a]. Two distinct metrics matter: shell areal density 343
(mass per unit structural area) and realised volumetric density (module mass per unit pres- 344
surised volume). They are not equivalent. For a spherical habitat of radius R with shell areal 345
density σ, shell mass scales as 4πR2σ while pressurised volume scales as (4/3)πR3, so the 346
corresponding volumetric density is σV = 3σ/R. Volumetric density therefore decreases lin- 347
early with size, which is precisely why large inflatable habitats become increasingly attractive 348
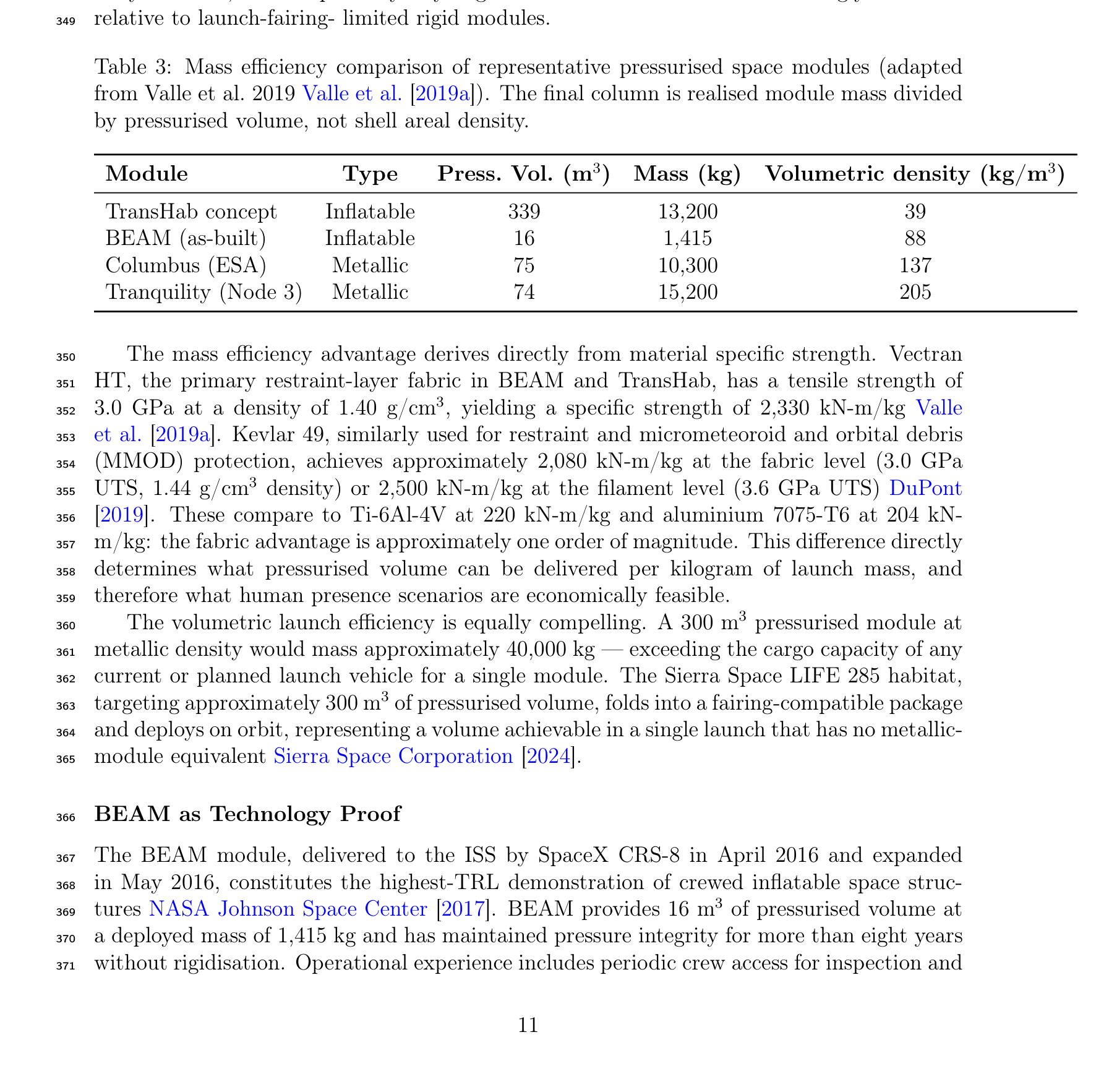
relative to launch-fairing- limited rigid modules. 349
Table 3: Mass efficiency comparison of representative pressurised space modules (adapted from Valle et al. 2019 Valle et al. [2019a]). The final column is realised module mass divided by pressurised volume, not shell areal density.
Module Type Press. Vol. (m3) Mass (kg) Volumetric density (kg/m3)
TransHab concept Inflatable 339 13,200 39 BEAM (as-built) Inflatable 16 1,415 88 Columbus (ESA) Metallic 75 10,300 137 Tranquility (Node 3) Metallic 74 15,200 205
The mass efficiency advantage derives directly from material specific strength. Vectran 350
HT, the primary restraint-layer fabric in BEAM and TransHab, has a tensile strength of 351
3.0 GPa at a density of 1.40 g/cm3, yielding a specific strength of 2,330 kN-m/kg Valle 352
et al. [2019a]. Kevlar 49, similarly used for restraint and micrometeoroid and orbital debris 353
(MMOD) protection, achieves approximately 2,080 kN-m/kg at the fabric level (3.0 GPa 354
UTS, 1.44 g/cm3 density) or 2,500 kN-m/kg at the filament level (3.6 GPa UTS) DuPont 355
[2019]. These compare to Ti-6Al-4V at 220 kN-m/kg and aluminium 7075-T6 at 204 kN- 356
m/kg: the fabric advantage is approximately one order of magnitude. This difference directly 357
determines what pressurised volume can be delivered per kilogram of launch mass, and 358
therefore what human presence scenarios are economically feasible. 359
The volumetric launch efficiency is equally compelling. A 300 m3 pressurised module at 360
metallic density would mass approximately 40,000 kg — exceeding the cargo capacity of any 361
current or planned launch vehicle for a single module. The Sierra Space LIFE 285 habitat, 362
targeting approximately 300 m3 of pressurised volume, folds into a fairing-compatible package 363
and deploys on orbit, representing a volume achievable in a single launch that has no metallic- 364
module equivalent Sierra Space Corporation [2024]. 365
BEAM as Technology Proof 366
The BEAM module, delivered to the ISS by SpaceX CRS-8 in April 2016 and expanded 367
in May 2016, constitutes the highest-TRL demonstration of crewed inflatable space struc- 368
tures NASA Johnson Space Center [2017]. BEAM provides 16 m3 of pressurised volume at 369
a deployed mass of 1,415 kg and has maintained pressure integrity for more than eight years 370
without rigidisation. Operational experience includes periodic crew access for inspection and 371
equipment storage, structural health monitoring via embedded accelerometers and impact 372
detection systems, and characterisation of the thermal, radiation, and MMOD environment. 373
BEAM’s deployment was not without difficulty: initial expansion attempts on 28 May 374
2016 required 25 pressurisation bursts over approximately seven hours to overcome friction 375
between compressed softgoods layers, compared to the planned single-burst expansion. This 376
experience provided critical engineering data on fold-compression set and deployment relia- 377
bility that directly informs the design of future autonomous deployment systems. Kennedy 378
(2002) documents the TransHab programme’s prior exploration of this challenge, including 379
burst pressure tests to 4× operating pressure and the critical importance of restraint-layer 380
preloading for deployment force prediction Kennedy [2002]. 381
Radiation: The Honest Assessment 382
BEAM data from the September 2017 solar particle event (SPE) revealed a critical finding 383
that must be stated clearly NASA Johnson Space Center [2017]. Absorbed dose measure- 384
ments in BEAM during the SPE were approximately 2–2.5 mGy, compared to approximately 385
0.25 mGy measured simultaneously in adjacent metallic ISS habitable volumes — an 8–10× 386
ratio. This finding demonstrates that fabric walls alone provide substantially less radiation 387
shielding than the aluminium walls of conventional modules. 388
This is not a disqualifying result, but it is a design constraint. The TransHab architecture 389
addressed this through a water-wall concept: a ∼10 cm thick water reservoir integrated into 390
the inner wall layers that provides both radiation shielding (hydrogen-rich material) and 391
useful crew water storage. Wang et al. (2025) review passive shielding materials for space 392
and confirm that polyethylene/aluminium composites achieve at least a 27.8% mass saving 393
relative to aluminium-only shielding for equivalent radiation protection Wang et al. [2025]. 394
The design solution is established; its implementation requires deliberate integration rather 395
than passive reliance on wall thickness. 396
2.3 Unifying Thesis: Shared Fabric Technology Across Applications 397
The central organising principle of this survey is that the high-strength fabric technology 398
enabling inflatable habitats is the same technology enabling compliant ADR capture arms, 399
large deployable debris shields, and the soft robotic systems operating within and around 400
both. This material unity has engineering consequences that extend beyond mere analogy. 401
Material Traceability Across Applications 402
Table 4 maps the four primary fabric families across their roles in different application do- 403
mains. The key observation is that the same material qualification data — creep behaviour, 404
AO erosion yield, UV degradation rate, thermal cycling tolerance — is relevant across all 405
applications. A Vectran creep characterisation campaign conducted for habitat restraint- 406
layer lifetime prediction Weadon [2013] is directly applicable to Vectran inflatable robotic 407
arm links Palmieri et al. [2023]. A Nextel/Kevlar debris shield hypervelocity test cam- 408
paign Destefanis et al. [2003] produces data applicable to both habitat MMOD protection 409
and inflatable debris shield design Cha et al. [2024]. 410
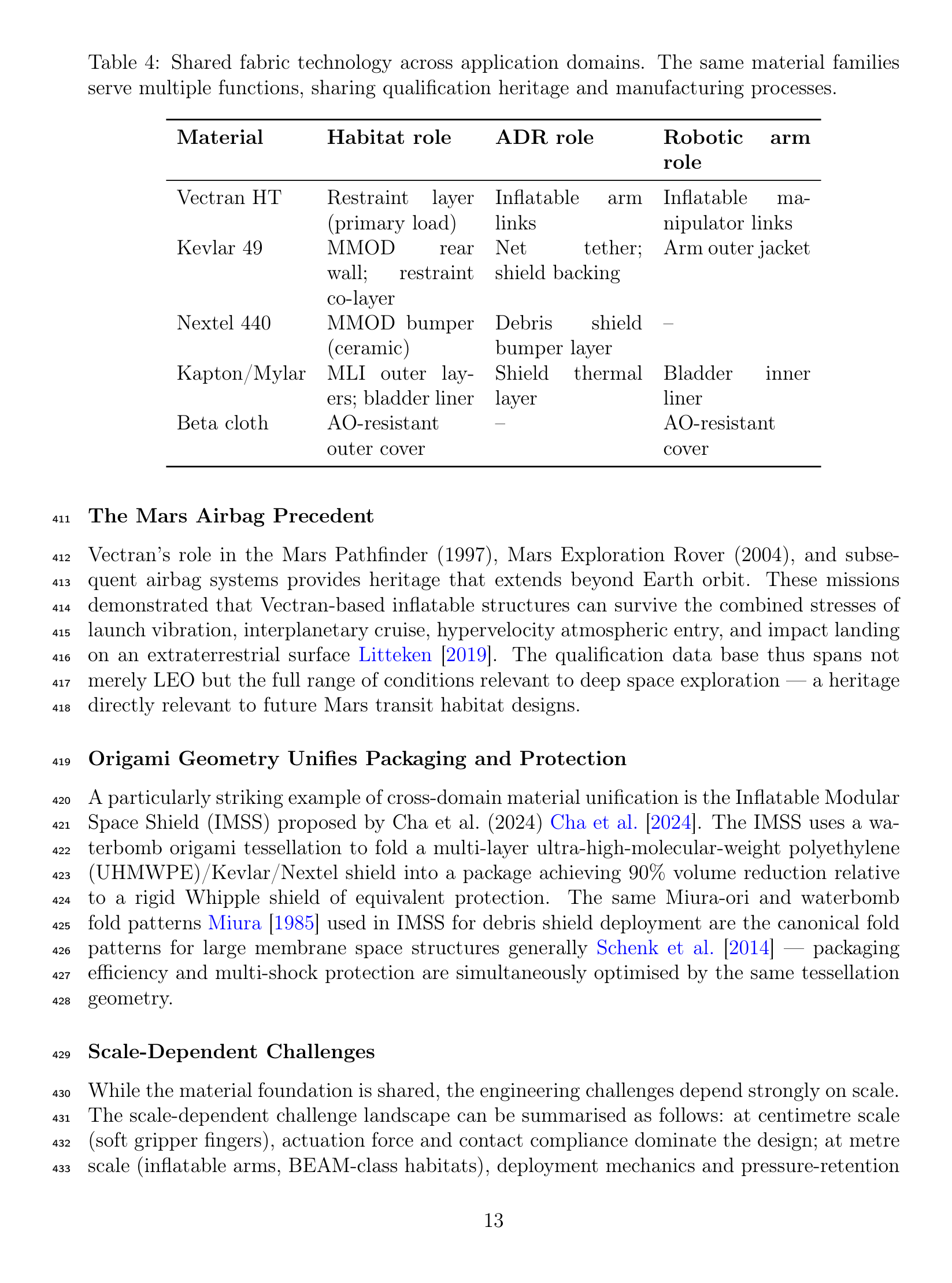
Table 4: Shared fabric technology across application domains. The same material families serve multiple functions, sharing qualification heritage and manufacturing processes.
Material Habitat role ADR role Robotic arm role
Vectran HT Restraint layer (primary load) Inflatable arm links Inflatable ma- nipulator links Kevlar 49 MMOD rear wall; restraint co-layer
Net tether; shield backing Arm outer jacket
Nextel 440 MMOD bumper (ceramic) Debris shield bumper layer –
Kapton/Mylar MLI outer lay- ers; bladder liner Shield thermal layer Bladder inner liner Beta cloth AO-resistant outer cover – AO-resistant cover
The Mars Airbag Precedent 411
Vectran’s role in the Mars Pathfinder (1997), Mars Exploration Rover (2004), and subse- 412
quent airbag systems provides heritage that extends beyond Earth orbit. These missions 413
demonstrated that Vectran-based inflatable structures can survive the combined stresses of 414
launch vibration, interplanetary cruise, hypervelocity atmospheric entry, and impact landing 415
on an extraterrestrial surface Litteken [2019]. The qualification data base thus spans not 416
merely LEO but the full range of conditions relevant to deep space exploration — a heritage 417
directly relevant to future Mars transit habitat designs. 418
Origami Geometry Unifies Packaging and Protection 419
A particularly striking example of cross-domain material unification is the Inflatable Modular 420
Space Shield (IMSS) proposed by Cha et al. (2024) Cha et al. [2024]. The IMSS uses a wa- 421
terbomb origami tessellation to fold a multi-layer ultra-high-molecular-weight polyethylene 422
(UHMWPE)/Kevlar/Nextel shield into a package achieving 90% volume reduction relative 423
to a rigid Whipple shield of equivalent protection. The same Miura-ori and waterbomb 424
fold patterns Miura [1985] used in IMSS for debris shield deployment are the canonical fold 425
patterns for large membrane space structures generally Schenk et al. [2014] — packaging 426
efficiency and multi-shock protection are simultaneously optimised by the same tessellation 427
geometry. 428
Scale-Dependent Challenges 429
While the material foundation is shared, the engineering challenges depend strongly on scale. 430
The scale-dependent challenge landscape can be summarised as follows: at centimetre scale 431
(soft gripper fingers), actuation force and contact compliance dominate the design; at metre 432
scale (inflatable arms, BEAM-class habitats), deployment mechanics and pressure-retention 433
integrity dominate; at 10-metre scale (large solar concentrators, small debris shields), control- 434
structure interaction begins to matter; at 100-metre scale (large debris shields, solar power 435
collectors), attitude and orbit control, aerodynamic drag compensation, power generation, 436
and thermal management become the primary engineering challenges, for which no flight 437
heritage exists. 438
This survey is organised to trace the technology from its best-proven applications (TRL 9 439
materials, TRL 9 BEAM habitat, TRL 8–9 rigid solar arrays) through to the most speculative 440
future capabilities (TRL 2–3 pressure-stabilised membrane AOCS, TRL 3–4 vacuum-gap 441
actuation), making explicit at each stage what is demonstrated, what is extrapolated, and 442
what requires new research. 443
Why Soft? Why Inflatable? Why Now? 444
Three converging developments make this survey timely. 445
Material advances. Vectran and Kevlar have matured to TRL 9 in space environments. 446
Perovskite/CIGS tandem solar cells, demonstrated at 2,100 W/kg with 85% proton radia- 447
tion retention after equivalent 50-year LEO exposure Lang et al. [2020], promise to integrate 448
power generation into inflatable membrane layers at specific powers unachievable with con- 449
ventional rigid panels. Cryogenic metallic cable-based soft robots (Foster-Hall et al. 2025) 450
maintain full range of motion at −196 ◦C, solving the elastomer embrittlement problem for 451
deep-space applications Foster-Hall et al. [2025]. 452
Mission context. The commercial station era (Orbital Reef, Axiom, LIFE, Starlab) cre- 453
ates the first sustained market demand for habitable volume beyond ISS. ESA’s ClearSpace-1 454
mission, targeting PROBA-1 for retrieval in the late 2020s, establishes ADR as an opera- 455
tional rather than experimental activity. The convergence of launch cost reduction (SpaceX 456
Falcon 9, Starship) with mission demand means that the technology development cost of 457
inflatable systems is now justifiable against a credible mission pull. 458
Paradigm shift. As outlined in Section 1, the space environment is increasingly un- 459
derstood as a resource for soft robotic systems rather than an obstacle. Vacuum-gap ac- 460
tuation Sîrbu et al. [2025], jamming without pumps Fitzgerald et al. [2020], and passive 461
microgravity compliance Araromi et al. [2015] represent a qualitative shift in what the space 462
environment enables. This survey maps these opportunities systematically across the full 463
technology stack. 464
The following sections develop the application use cases (Sections 3 and 4) before re- 465
viewing the enabling technology state-of-the-art (Sections 5–12), and concluding with a 466
consolidated gap analysis and research roadmap (Section 13). 467
3 Use Cases: Active Debris Removal 468
The orbital debris environment—characterised in Section 2.1—represents the most urgent 469
operational motivation for soft inflatable robotic systems in space. With over 54,000 esti- 470
mated objects larger than 10 cm, 15,800 tonnes of total orbital mass, and a 65-fold increase 471
in Starlink collision avoidance manoeuvres since 2021 ESA Space Debris Office [2025], the 472
operational urgency is undeniable. 473
The scientific foundation for active debris removal (ADR) was established by Kessler and 474
Cour-Palais Kessler and Cour-Palais [1978], who developed the first mathematical model pre- 475
dicting cascading collisional fragmentation in low Earth orbit (LEO). Their analysis identified 476
three debris population regimes—stable, critical, and cascading—and predicted the forma- 477
tion of a debris belt within a century. Subsequent Monte Carlo simulations by Liou and 478
Johnson Liou and Johnson [2006, 2008] using the NASA LEGEND model with 200-year pro- 479
jections across 50 runs demonstrated that the LEO debris population had already crossed 480
the instability threshold: the number of objects would continue to grow even with zero future 481
launches. Their work quantified the minimum intervention rate, establishing that at least 482
five large objects per year must be removed from the 800–1000 km altitude bands to stabilise 483
the environment Liou et al. [2010]. At approximately 550 km altitude, debris spatial density 484
now equals active satellite density—an unprecedented situation that fundamentally changes 485
the risk calculus for orbital operations ESA Space Debris Office [2025]. 486
This section examines the role of soft and inflatable systems in addressing the debris 487
challenge. We first review conventional rigid capture approaches and their inherent fragmen- 488
tation risk (Section 3.1), then survey eight distinct soft and compliant capture mechanisms 489
(Section 3.2), and finally discuss inflatable debris shields as passive protection infrastructure 490
(Section 3.3). 491
3.1 Rigid Capture Approaches and Fragmentation Risk 492
Active debris removal using rigid robotic manipulators has been the dominant paradigm in 493
mission planning for the past two decades. Rybus Rybus [2024] provides the most recent 494
comprehensive review in Progress in Aerospace Sciences of rigid manipulators for on-orbit 495
servicing and ADR, covering flight-heritage systems such as the Canadarm and the European 496
Robotic Arm (ERA), cancelled missions including ESA’s e.deorbit, and planned missions 497
such as ClearSpace-1. The review documents the extensive engineering heritage of rigid 498
robotic arms but also explicitly acknowledges the potential for fragmentation generation 499
during debris capture Rybus [2024]. 500
Ledkov and Aslanov Ledkov and Aslanov [2022] survey the full spectrum of ADR meth- 501
ods in Progress in Aerospace Sciences, including nets, harpoons, robotic arms, tentacles, ion 502
beam shepherding, laser ablation, electrostatic tractors, and electrodynamic tethers. Their 503
analysis notes that contactless methods such as ion beam shepherding—capable of deorbit- 504
ing a 2-tonne debris object in 3–4 months—carry zero mechanical impact risk, but require 505
extended proximity operations and significant power budgets. Contact-based methods, while 506
operationally faster, necessarily introduce mechanical loads to the target. 507
The only in-orbit ADR technology demonstration to date is the RemoveDebris mission, 508
documented by Aglietti et al. Aglietti et al. [2020]. This mission successfully demonstrated 509
net capture of a CubeSat at 5 cm/s relative velocity and 7 m separation distance, as well 510
as harpoon firing at 20 m/s into a target panel at 1.5 m range. Two results are particu- 511
larly instructive. First, the net capture succeeded but was conducted against a cooperative 512
2U CubeSat (expanded to approximately 1 m pyramidal target), which is not representative 513
of real debris targets of 500 kg–8 tonnes tumbling at 1–5 deg/s. Second, and more critically, 514
the harpoon test resulted in the snapping of the carbon fibre boom from impact forces, de- 515
spite the harpoon itself being retained by its tether Aglietti et al. [2020]. This structural 516
failure during a controlled test illustrates the magnitude of impulse loads that contact-based 517
capture imposes. 518
3.1.1 The Fragmentation Paradox 519
The central paradox of rigid-body ADR is that the very act of removing debris may generate 520
new fragments, potentially worsening the environment it aims to protect. This concern is 521
supported by multiple lines of evidence: 522
• Zhang et al. Zhang et al. [2023b] note that rigid manipulation “has the potential to 523
generate fragments during [the] capturing phase, hence increase [the] risk of further 524
space debris.” 525
• Chen et al. Chen et al. [2024] assess that “single contact-based caging [is] excessively 526
risky for fast-tumbling targets with unknown mass—momentum transfer could create 527
new debris.” 528
• Dynamic simulations of the cancelled e.deorbit mission show peak torques of 195 Nm 529
at the manipulator joints when attempting to capture a target tumbling at only 5 deg/s 530
(the ENVISAT upper stage) Stolfi et al. [2017], reaching the operational limits of the 531
robotic joints. 532
• The Aerospace Corporation’s IMPACT model establishes 10 J/g specific energy as the 533
threshold for catastrophic fragmentation of a satellite Aerospace Corporation [2020]. 534
ClearSpace-1, the first contracted commercial debris removal mission (ESA, €86M con- 535
tract), plans to use four rigid robotic arms to capture the Proba-1 satellite (95 kg, 0.6×0.6× 536
0.8 m) ClearSpace SA and European Space Agency [2020]. The mission’s planning was itself 537
disrupted by the debris problem: the original target, the VESPA upper stage, was struck by 538
a tracked debris object during mission preparation, illustrating the cascading urgency of the 539
debris environment ClearSpace SA and European Space Agency [2020]. Launch is currently 540
planned for approximately 2029. 541
To place the fragmentation risk in perspective, we separate contact stress from rotational 542
energy. A rigid robotic arm exerting 195 Nm of torque at a 0.5 m lever arm produces a 543
contact force of 390 N. If this force acts over a contact area of 10 cm2 on a honeycomb panel 544
with typical crush strength of 1–3 MPa, the resulting stress of 0.39 MPa falls below the 545
crush threshold of the primary structure; if the load is concentrated into a 1 cm2 bracket, 546
hinge, or fastener contact, the local stress rises to 3.9 MPa. The fragmentation risk is 547
therefore not primarily to the strongest structural components, but to the most vulnerable: 548
degraded solar panel hinge joints, aged thermal blanket fasteners, corroded aluminium alloy 549
brackets, and antenna feed structures that have experienced decades of thermal cycling, UV 550
degradation, and atomic oxygen erosion. These appendage materials may have lost 30– 551
60% of their original strength through environmental degradation, reducing effective crush 552
thresholds well below nominal values. 553
The total rotational kinetic energy check is correspondingly scale-dependent. At 5 deg/s 554
(0.0873 rad/s), a 100 kg object with characteristic radius 0.5 m has I ≈25 kg·m2 and only 555
1 2Iω2 ≈0.095 J of rotational kinetic energy, so the IMPACT catastrophic fragmentation 556
threshold of 10 J/g Aerospace Corporation [2020], Johnson et al. [2001] is not a useful 557
bulk-energy argument for sub-tonne debris. For an ENVISAT-class object (m ≈8,000 kg, 558
I ≈1.7 × 104 kg·m2) tumbling at the same angular rate, the stored rotational energy is 559
approximately 65 J; concentration of that energy into gram-scale appendage hardware gives 560
specific energies of order 6–65 J/g. A compliant grasp distributing contact force and despin 561
energy over a larger area and longer time period reduces peak local stress and specific energy 562
by one to two orders of magnitude. 563
The fragmentation risk is therefore physically plausible and supported by qualitative as- 564
sessments, though not yet experimentally quantified. This survey adopts the precautionary 565
principle: compliant capture is preferred until quantitative data become available, on the 566
basis that the consequences of inadvertent fragmentation during ADR—potentially generat- 567
ing hundreds of new tracked objects—are severe enough to warrant risk-averse technology 568
selection even in the absence of definitive comparative data. A comprehensive, quantita- 569
tive comparison of fragmentation probability as a function of contact compliance remains 570
the single highest-priority open experimental question the community must address (see 571
Section 13). 572
Table 5 summarises the principal ADR technology classes, their technology readiness 573
levels (TRL), contact characteristics, and assessed fragmentation risk. 574
3.2 Soft and Compliant Capture Mechanisms 575
The fragmentation risk inherent in rigid capture has motivated the development of soft and 576
compliant alternatives that absorb, rather than transmit, kinetic energy during the capture 577
interaction. Eight distinct soft and compliant capture approaches have been documented in 578
the literature, all currently at TRL 2–5. We review each in turn, organised by their operating 579
principle: adhesion-based, bistable/passive, inflatable-arm, and net-plus-inflatable systems. 580
3.2.1 Gecko-Inspired Dry Adhesive Grippers 581
The most mature soft capture technology is the gecko-inspired dry adhesive gripper demon- 582
strated by Jiang et al. Jiang et al. [2017]. Published in Science Robotics, this system uses 583
shear-activated van der Waals adhesion pads with a load-sharing tendon-pulley mechanism 584
that scales adhesion from small patches to large contact areas. Critically, a nonlinear pas- 585
sive wrist provides high stiffness during normal manipulation but becomes compliant under 586
overload, offering inherent protection against excessive contact forces. 587
The gecko gripper was validated in actual microgravity during NASA parabolic flight 588
campaigns, achieving capture success rates of 100% for spherical targets, 75% for cubic tar- 589
gets, and 81% for cylindrical targets, with objects up to approximately 400 kg and diameters 590
exceeding 1 m Jiang et al. [2017]. Failures were attributed to human operator misalignment 591
rather than adhesive performance. The system achieves essentially zero mechanical impact 592
force—a fundamental advantage for fragmentation avoidance. We note, following the taxon- 593
omy of Shintake et al. Shintake et al. [2018], that the gecko gripper is more precisely classified 594
as a compliant end-effector mechanism on a rigid platform rather than a fully soft robotic 595
system; nevertheless, its compliant capture interface directly addresses the fragmentation 596
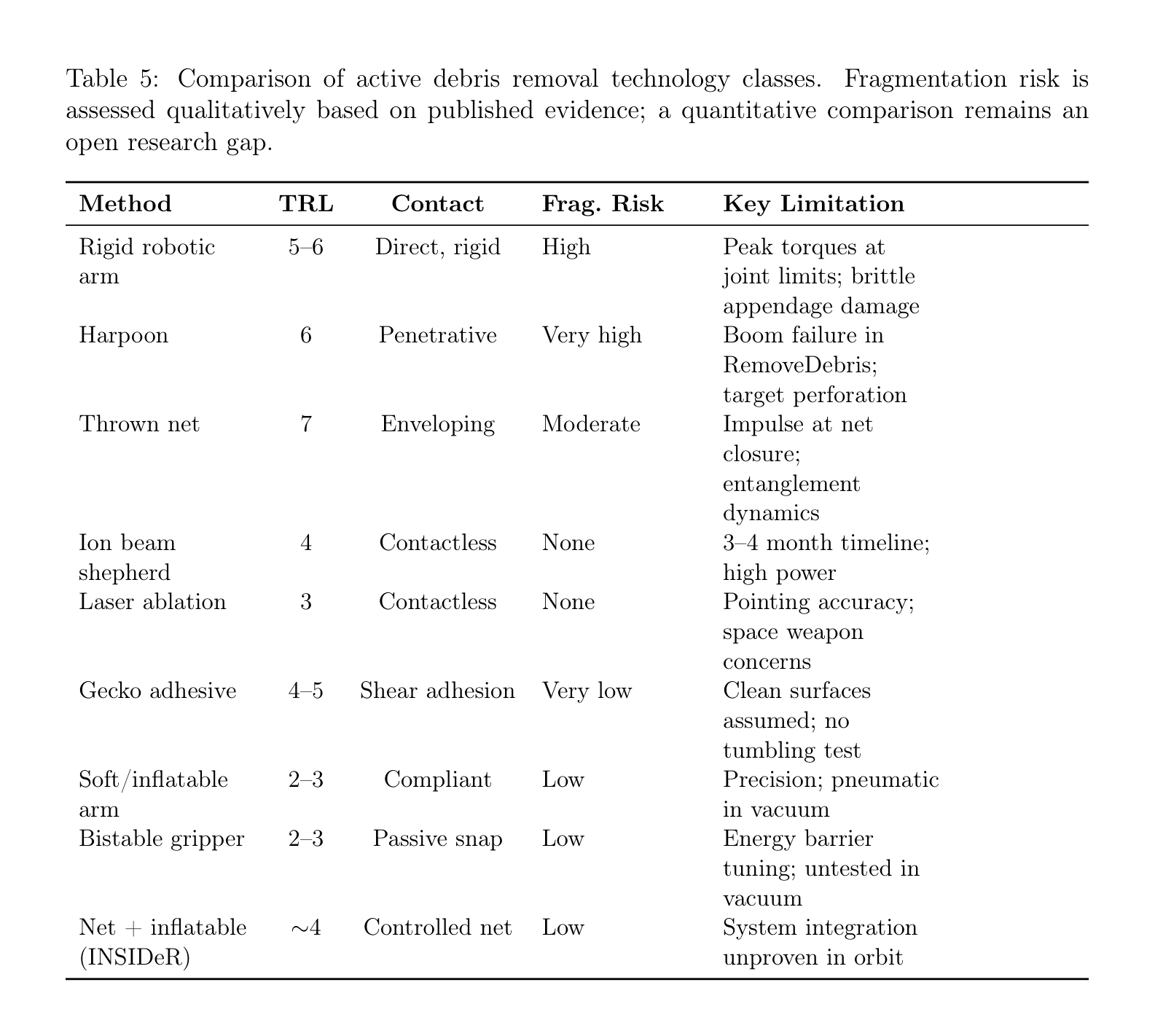
Table 5: Comparison of active debris removal technology classes. Fragmentation risk is assessed qualitatively based on published evidence; a quantitative comparison remains an open research gap.
Method TRL Contact Frag. Risk Key Limitation
Rigid robotic arm 5–6 Direct, rigid High Peak torques at joint limits; brittle appendage damage Harpoon 6 Penetrative Very high Boom failure in RemoveDebris; target perforation Thrown net 7 Enveloping Moderate Impulse at net closure; entanglement dynamics Ion beam shepherd 4 Contactless None 3–4 month timeline; high power Laser ablation 3 Contactless None Pointing accuracy; space weapon concerns Gecko adhesive 4–5 Shear adhesion Very low Clean surfaces assumed; no tumbling test Soft/inflatable arm 2–3 Compliant Low Precision; pneumatic in vacuum Bistable gripper 2–3 Passive snap Low Energy barrier tuning; untested in vacuum Net + inflatable (INSIDeR) ∼4 Controlled net Low System integration unproven in orbit
concern. At TRL 4–5, it represents the highest-readiness soft capture technology, though 597
significant gaps remain: all testing used cooperative (stationary) targets, and performance 598
under space vacuum, UV radiation, atomic oxygen exposure, and thermal cycling has not 599
been demonstrated. 600
3.2.2 Dielectric Elastomer Minimum Energy Structure (DEMES) Grippers 601
Araromi et al. Araromi et al. [2015] developed a DEMES-based deployable gripper explic- 602
itly for the CleanSpace One ADR mission. The device uses dielectric elastomer actuators 603
(DEAs) bonded to a flexible frame, achieving rollable compact storage and deployment to 604
a multi-segment gripper with bending angles exceeding 60°. Each arm produces forces in 605
the mN range, sufficient only for microgravity manipulation of small, lightweight targets. 606
The system demonstrated over 860,000 actuation cycles with individual arm mass below 607
0.65 g Araromi et al. [2015]. At TRL 3–4, the DEMES gripper is notable as the only soft 608
capture device explicitly designed for an actual ADR mission, although the CleanSpace One 609
mission architecture subsequently evolved without the gripper flying. Key limitations in- 610
clude the high operating voltage (∼kV) required for DEAs in vacuum (arcing risk) and the 611
absence of cryogenic or thermal cycling testing. 612
3.2.3 Bistable and Passive Capture Grippers 613
Two distinct bistable gripper concepts have been proposed for ADR. Liu et al. Liu et al. 614
[2023] developed a bistable snap-through gripper that captures targets using the kinetic 615
energy of the collision itself, requiring no external power for the grasping action. The gripper 616
deforms on contact, absorbs kinetic energy, triggers a bistable snap, and locks into the closed 617
configuration. The energy barrier is adjustable through pre-deformation of the bistable 618
elements, allowing tuning for different target masses and approach velocities Liu et al. [2023]. 619
This passive capture concept eliminates the need for precise actuation timing—a significant 620
advantage for tumbling, non-cooperative targets. 621
Zhang et al. Zhang et al. [2023c] propose a Venus flytrap-inspired bistable origami gripper 622
actuated by a shape memory alloy spring actuator (SMASA) that provides slow energy 623
storage followed by rapid release, with a DEA bristle-locking structure that prevents target 624
escape after capture. Capture is achieved within approximately 300 ms, and the device has 625
been demonstrated on complex geometries including asteroid models and spacecraft mock- 626
ups Zhang et al. [2023c]. Both bistable concepts remain at TRL 2–3, with no vacuum, 627
thermal, or microgravity testing. 628
3.2.4 Thermally Qualified Soft Grippers 629
Addressing the thermal environment is critical for any space capture mechanism. Ruiz 630
Vincueria et al. Ruiz Vincuería et al. [2024] developed a multi-layered soft gripper combining 631
TPU, silicone, PTFE, and aerogel layers, tested across the full orbital thermal range from 632
−180°C to +220°C. A counter-intuitive but operationally significant finding is that grasping 633
forces increase by 220% at cryogenic temperatures due to cold stiffening of the elastomeric 634
layers, while decreasing by at most 50% at the hot extreme Ruiz Vincuería et al. [2024]. The 635
gripper uses MoS2 solid lubricant for vacuum compatibility and is available in dual and quad 636
arm configurations. This work provides the most quantitative thermal performance data 637
for any soft capture device and explicitly compares its approach against the ClearSpace-1 638
and Astroscale rigid arm architectures. However, all testing was conducted in laboratory 639
conditions without vacuum, radiation, or microgravity validation (TRL 2). 640
Foster-Hall et al. Foster-Hall et al. [2025] introduce a fundamentally different approach 641
to the cryogenic challenge: metallic cable-driven soft robotic structures tested at −196°C in 642
liquid nitrogen. Unlike elastomeric soft robots that embrittle at cryogenic temperatures, the 643
modular metallic cable structures exhibited only 5% stiffness increase over 100 actuation cy- 644
cles, maintained full range of motion, and showed no microfractures under scanning electron 645
microscopy—consistent with cold-working behaviour in stainless steel rather than brittle 646
failure Foster-Hall et al. [2025]. Two-dimensional grasping was demonstrated at −196°C. At 647
TRL 2–3, this work opens a new design paradigm for soft space robotics beyond elastomers, 648
though three-dimensional manipulation and vacuum testing remain to be demonstrated. 649
3.2.5 Inflatable Robotic Arms for Capture 650
Palmieri et al. Palmieri et al. [2023] developed the POPUP robot: a 7-DOF manipulator 651
with inflatable links and rigid electric motor joints, incorporating visual servoing via dual 652
cameras and high-stiffness fibre reinforcement. The inflatable links provide significant mass 653
and volume reduction compared to equivalent rigid arms, and simulation demonstrates debris 654
capture feasibility despite the inherent compliance of the links Palmieri et al. [2023]. A 3- 655
DOF ground prototype has been statically characterised (TRL 3), but key challenges remain: 656
the compliance of inflatable links reduces end-effector positioning precision, the pneumatic 657
inflation system must operate in vacuum, and no thermal or radiation testing has been 658
performed. 659
3.2.6 INSIDeR: Net Capture with Inflatable Deployment 660
The Innovative Net and Space Inflatable structure for active Debris Removal (INSIDeR) 661
is a patented CNES/ESA-funded concept that combines the proven in-orbit heritage of 662
net capture (demonstrated by RemoveDebris) with inflatable deployment structures CT 663
Ingénierie et al. [2017, 2021]. The system architecture comprises an inflatable ring and 664
two inflatable masts that deploy and guide a capture net, followed by a deorbit tether for 665
removal. The complete capture sequence proceeds through six phases: inflation of the ring 666
and masts, net deployment, approach boost, mast detachment and deflation, net capture, 667
and tether-assisted deorbit CT Ingénierie et al. [2017]. 668
A key innovation is that the inflatable masts provide controlled, slow net dynamics, 669
eliminating the large impulse peaks associated with conventional spring-ejected nets and 670
thereby reducing momentum transfer to the target CT Ingénierie et al. [2021]. The system 671
packages into a cube of approximately 50 cm per side, forming a plug-and-play ADR kit 672
adaptable to any target mass, morphology, or tumbling rate. Developed over 15 years by 673
CT Ingénierie and AirCaptif (Michelin group) with CNES and ESA co-funding, INSIDeR has 674
reached TRL ∼4 at the system level (individual subsystem technologies at TRL 5+), with 675
a ground demonstrator under construction as of 2021 CT Ingénierie et al. [2021]. ABAQUS 676
finite element simulations have confirmed net capture feasibility. 677

Table 6 provides a comprehensive comparison of all documented soft and compliant cap- 678
ture approaches. 679
102
Tendon-driven
Gecko adhesive
Vacuum-gap electrostatic
SMA (one-shot)
101
Inflatable arm
Force output (N)
Bistable gripper
100
10−1
10−2
Category / Est. mass
Adhesive Electroactive Mechanical Shape memory Passive
Pneumatic 0.1 kg 2 kg 5 kg
DEMES / DEA
10−3
Flight qualified
INSIDeR (net capture, TRL 4) Concept Validation
1 2 3 4 5 6 7 8 9 10 Technology Readiness Level (TRL)
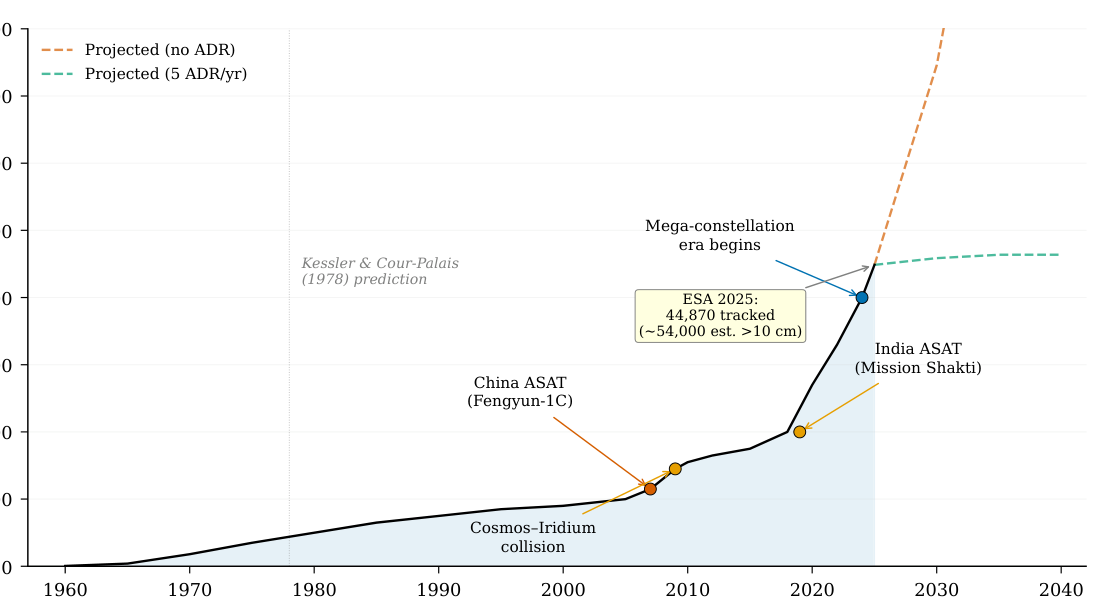
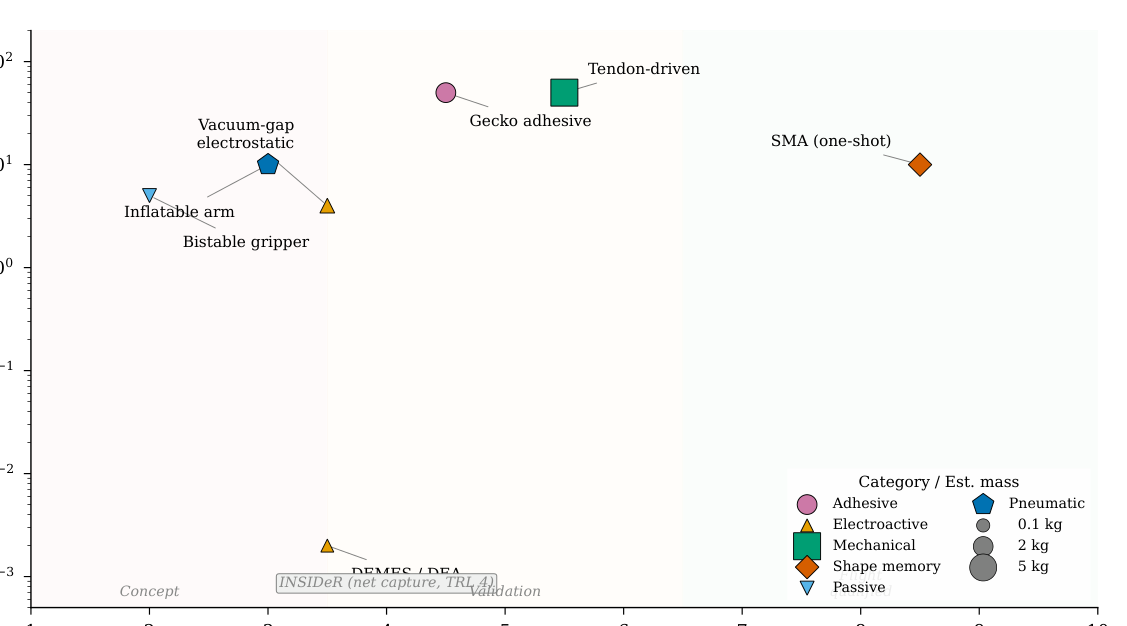
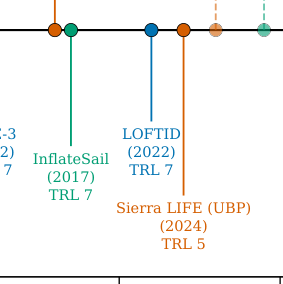
Figure 2: Force output versus technology readiness level (TRL) for soft and compliant cap- ture approaches. Marker size indicates system mass. The gecko adhesive gripper occupies the highest-TRL, highest-force quadrant, representing the most flight-ready soft capture technology.
The most significant observation from this landscape is the absence of orbital flight 680
heritage for any soft capture system. The gecko adhesive gripper, at TRL 4 with microgravity 681
validation, and INSIDeR, at TRL 4 with system-level ground demonstration, represent the 682
nearest-term candidates for flight demonstration. We identify the combination of a gecko 683
adhesive gripper mounted on an inflatable arm with fibre Bragg grating structural health 684
monitoring (see Section 8.1) as the most flight-ready near-term soft ADR demonstrator—a 685
system that leverages the highest-TRL end-effector, the mass efficiency of inflatable links, 686
and embedded sensing for operational awareness. 687
3.3 Inflatable Debris Shields 688
Beyond active capture, inflatable structures offer a complementary approach to the debris 689
problem through passive shielding. Conventional rigid Whipple shields Christiansen [2009], 690
which use spaced aluminium bumper plates to disrupt and disperse hypervelocity projectiles 691
before they reach the pressure wall, are effective but carry significant mass and volume 692
penalties. The substitution of rigid bumper plates with flexible fabric layers—using the 693
same high-strength materials (Nextel ceramic fabric, Kevlar, and ultra-high molecular weight 694
polyethylene, UHMWPE) that form the basis of inflatable habitat walls—enables deployable 695
shields with dramatically improved packaging efficiency. 696
Destefanis et al. Destefanis et al. [2006] demonstrated that stuffed Whipple shields using 697
Nextel and Kevlar layers protect against projectiles twice the diameter of those stopped by 698
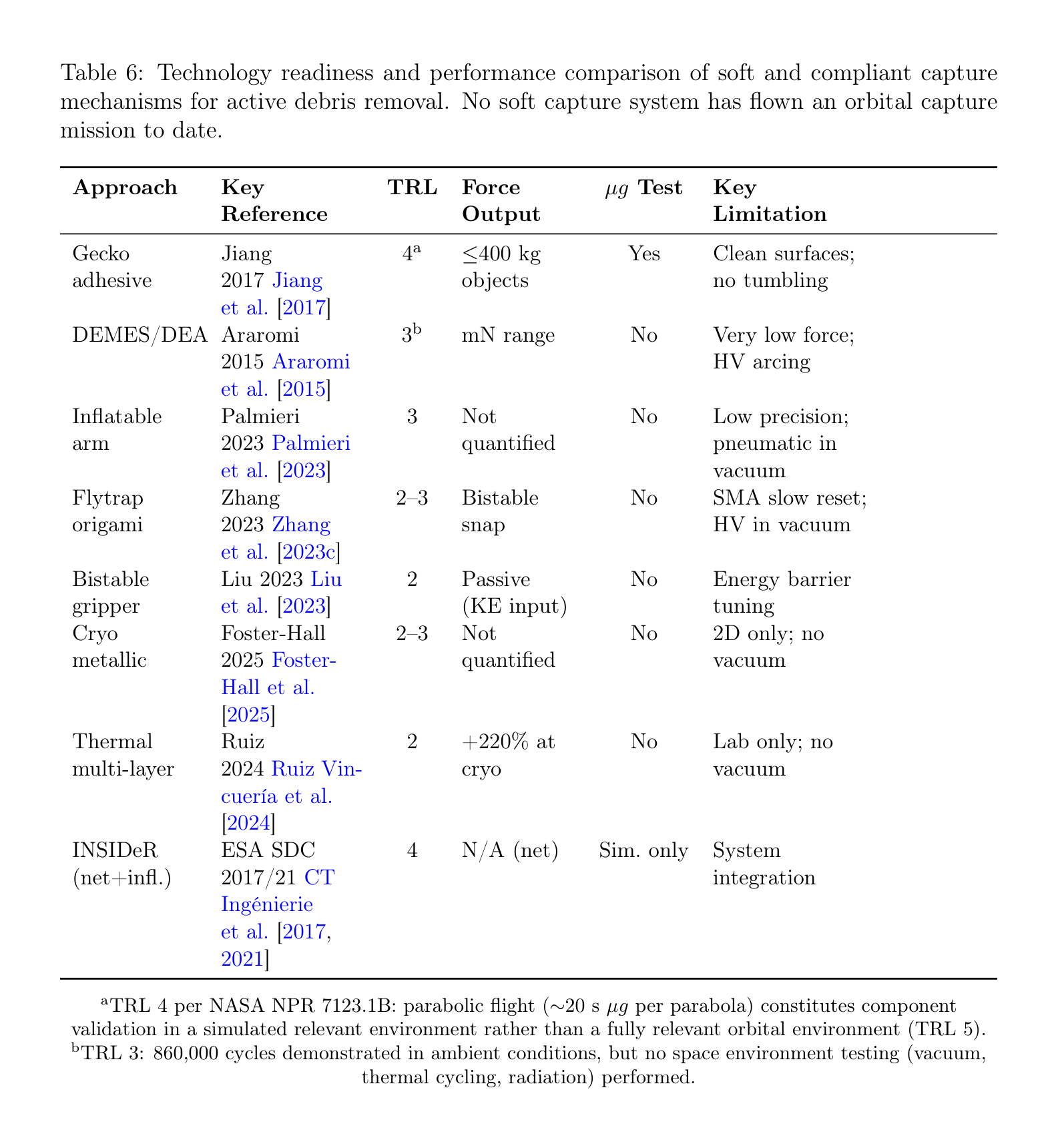
Table 6: Technology readiness and performance comparison of soft and compliant capture mechanisms for active debris removal. No soft capture system has flown an orbital capture mission to date.
Approach Key Reference TRL Force Output µg Test Key Limitation
4a ≤400 kg objects Yes Clean surfaces; no tumbling
Gecko adhesive Jiang 2017 Jiang et al. [2017]
3b mN range No Very low force; HV arcing
DEMES/DEA Araromi 2015 Araromi et al. [2015]
Inflatable arm Palmieri 2023 Palmieri et al. [2023]
3 Not quantified No Low precision; pneumatic in vacuum Flytrap origami Zhang 2023 Zhang et al. [2023c]
2–3 Bistable snap No SMA slow reset; HV in vacuum
Bistable gripper Liu 2023 Liu et al. [2023] 2 Passive (KE input) No Energy barrier tuning Cryo metallic Foster-Hall 2025 Foster- Hall et al. [2025]
2–3 Not quantified No 2D only; no vacuum
Thermal multi-layer Ruiz 2024 Ruiz Vin- cuería et al. [2024]
2 +220% at cryo No Lab only; no vacuum
INSIDeR (net+infl.) ESA SDC 2017/21 CT Ingénierie et al. [2017, 2021]
4 N/A (net) Sim. only System integration
aTRL 4 per NASA NPR 7123.1B: parabolic flight (∼20 s µg per parabola) constitutes component validation in a simulated relevant environment rather than a fully relevant orbital environment (TRL 5). bTRL 3: 860,000 cycles demonstrated in ambient conditions, but no space environment testing (vacuum, thermal cycling, radiation) performed.
standard aluminium Whipple shields at equal areal density. This finding established the 699
performance advantage of fabric-based shielding architectures that underlies both habitat 700
micrometeoroid and orbital debris (MMOD) protection and standalone shield concepts. 701
Cha et al. Cha et al. [2024] present the Inflatable Multi-Shock Shield (IMSS), which ap- 702
plies waterbomb tessellation origami to create a deployable multi-bumper debris shield that 703
expands approximately 80% beyond its initial radius while achieving 90% volume savings 704
compared to an equivalent rigid Whipple shield. The IMSS uses UHMWPE fibre for ballistic 705
protection within a five-bumper configuration, with 50 mm bumper spacing accommodated 706
in a 400 mm stowed stack Cha et al. [2024]. A critical design feature is that all material 707
in the deployed configuration contributes to debris protection—there is no structural dead 708
weight. The origami fold geometry that enables compact packaging simultaneously creates 709
the inter-bumper spacing required for effective hypervelocity projectile disruption, embody- 710
ing a dual-functionality design principle applicable to large deployable structures generally 711
(see Section 4.3 for related deployment mechanics). 712
At TRL 2–3, the IMSS concept requires further development in hypervelocity impact 713
validation, large-scale (>10 m) deployment demonstration, and inflation system design. 714
Nevertheless, the material commonality between inflatable debris shields, inflatable habi- 715
tat MMOD layers, and inflatable robotic arm structural fabrics reinforces the survey’s 716
central thesis: the same high-strength fabric technology base—Vectran, Kevlar, Nextel, 717
UHMWPE—enables debris capture, debris protection, and habitable volume creation. 718
For very large-scale applications, inflatable debris shields of 100 m class have been pro- 719
posed as orbital infrastructure to protect high-value assets or clear debris corridors. Such 720
structures would require the attitude and orbit control technologies discussed in Section 11 721
and the robotic in-orbit assembly capabilities reviewed in Section 12, linking the passive 722
protection concept back to the active robotic systems that are the primary focus of this 723
survey. 724
4 Use Cases: Habitats and Exploration 725
Inflatable space structures for human habitation represent the second major application 726
domain where soft and flexible technologies offer transformative advantages over conventional 727
rigid systems. The fundamental value proposition is mass efficiency: high-strength fabrics 728
such as Vectran and Kevlar possess specific tensile strengths of 2,330 and 2,080 kN·m/kg 729
respectively at the fabric level (or 2,500 kN·m/kg for Kevlar 49 filament)—more than an 730
order of magnitude greater than titanium alloy Ti-6Al-4V at 220 kN·m/kg or aluminium 731
7075 at 204 kN·m/kg Valle et al. [2019a]. This advantage translates directly into the ability 732
to launch habitable volumes that would be physically impossible with metallic construction 733
within current launch vehicle fairing constraints. A fabric-walled habitat is not merely a 734
lighter alternative to a metallic module; it enables architectural possibilities—volumes of 735
300–1,400 m3—that have no rigid equivalent. 736
This section traces the heritage of inflatable space habitation from its origins in 1960 to 737
the present day (Section 4.1), reviews current commercial programs (Section 4.2), surveys 738
future concepts for lunar, Martian, and planetary applications (Section 4.3), and addresses 739
the critical issue of radiation shielding with an honest assessment of the BEAM solar particle 740
event findings (Section 4.4). 741
4.1 Heritage Timeline: Echo to BEAM 742
The heritage of inflatable space structures spans over six decades, progressing through a 743
non-linear TRL trajectory marked by both remarkable successes and programmatic setbacks. 744
Table 7 summarises the key milestones. 745
Table 7: Heritage timeline of inflatable space structures, from passive communication reflec- tors to human-rated orbital habitats. TRL ratings reflect achieved (not planned) readiness at programme conclusion or present status.
Year Programme TRL Key Achievement
1960 Echo 1 (NASA) 9 30.5 m (100 ft) Mylar sphere; 8+ years on-orbit; global communications relay 1965 Volga airlock (USSR) 9 First human-rated inflatable; Voskhod-2 EVA (Leonov); 40 airbags, 3 independent groups, 7 min inflation 1996 IAE/Spartan 207 (NASA) 7 14 m antenna; 28 m Kevlar/Neoprene booms; Shuttle deployment demonstration 1997 Mars Pathfinder airbags 9 Vectran fabric; operational landing on 3 missions (Pathfinder, Spirit, Opportunity) 1997–2000 TransHab (NASA JSC) 5–6 8.2 m × 11 m; 5-layer shell; tested to 4× operating pressure; cancelled by Congress (HR 1654) 2006–07 Genesis I/II (Bigelow) 7–8 Orbital validation; 2.5+ years on-orbit; pressure retention confirmed 2009 IRVE-II (NASA LaRC) 7 3 m inflatable reentry vehicle experiment; suborbital demonstration 2016+ BEAM (Bigelow/NASA) 9 16 m3; 1,415 kg; 8+ years on ISS; converted to cargo storage; operational 2022 LOFTID (NASA) 7–8 6 m inflatable aerodecelerator; orbital reentry at Mach 30
4.1.1 Early Inflatables: Echo and Volga (1960–1965) 746
Project Echo, initiated by NASA in 1960, deployed Echo 1 as a 30.5 m diameter Mylar 747
balloon serving as a passive communications reflector Litteken [2019]. The satellite operated 748
for over eight years and enabled global communications experiments and geodetic measure- 749
ments. Echo 2 (1964) advanced the concept with a rigidisable aluminium foil/Mylar laminate 750
structure. While neither was habitable, the Echo programme demonstrated that large, thin- 751
walled inflatable structures could survive the LEO environment for extended periods. 752
LIFE in-space test
(∼2026, planned)
TRL 6
Volga airlock
IRVE-II

(1965)
(2009)
TRL 9
Echo 1 (1960)
Mars Pathfinder
Genesis I
BEAM (2016)
ClearSpace-1 (∼2029, planned)
TRL 7
(1997)
(2006)
TRL 9
TRL 9
TRL 8
TRL 8
TRL 5
Echo 2 (1964)
IAE / Spartan 207
IRVE-3
LOFTID
Genesis II
(1996)
(2012)
(2022)
InflateSail
(2007)
TRL 9
TRL 7
TRL 7
TRL 7
(2017)
TRL 8
TransHab
TRL 7
Sierra LIFE (UBP)
(1999)
(2024)
TRL 6
NASA Commercial
ESA / International Planned
TRL 5
1960 1970 1980 1990 2000 2010 2020 2030 Year
Figure 3: Heritage timeline of inflatable space structures from Echo 1 (1960) to LOFTID (2022), illustrating the progression from passive communication reflectors through human- rated habitats to active aerodynamic decelerators. Colour coding indicates programme ori- gin; marker size reflects achieved TRL.
The Volga airlock, deployed for the Voskhod-2 mission in 1965, represents the first human- 753
rated inflatable space structure Litteken [2019]. Designed for Alexei Leonov’s historic first 754
spacewalk, the Volga used 40 airbags arranged in three independent groups to inflate a 2.4 m 755
long, 1.2 m diameter cylindrical airlock in seven minutes. The successful EVA validated 756
the fundamental concept that pressurised inflatable structures could safely support human 757
operations in space, albeit for a single use. 758
4.1.2 TransHab: Proving the Five-Layer Architecture (1997–2000) 759
The Transit Habitat (TransHab) programme at NASA Johnson Space Center represented the 760
most ambitious inflatable habitat development prior to BEAM. Under Principal Architect 761
Kriss Kennedy Kennedy [2002] and shell lead Gerard Valle, the team developed an 8.2 m 762
diameter, 11 m long module with a five-layer shell architecture that has become the standard 763
for all subsequent inflatable habitat designs Valle et al. [2019a]: 764
1. Inner liner: Nomex scuff protection layer. 765
2. Bladder: Multiple redundant layers, oversized relative to the restraint layer and car- 766
rying zero structural load. 767
3. Restraint layer: Tight basket-weave Kevlar/Vectran biaxial membrane, designed to 768
a safety factor of 4.0× per NASA-STD-5001. 769
4. MMOD shield: Ceramic (Nextel) bumper, open-cell foam spacer, and Kevlar rear 770
wall—vacuum-packed for launch, with foam self-expanding in orbit. 771
5. Multi-layer insulation (MLI): 19 layers of double-aluminised Mylar/Kapton, with 772
perforated inner layers for venting during depressurisation. 773
TransHab was tested to 4× ambient pressure (>54 psig) in a September 1998 hydrostatic 774
burst test, and full-scale vacuum deployment was demonstrated Kennedy [2002]. Hyperveloc- 775
ity impact testing confirmed that the MMOD shield outperformed the aluminium structure 776
of ISS modules. The programme also pioneered the water wall radiation shelter concept, 777
positioning crew quarters within a rigid central core surrounded by water-filled containers 778
for radiation protection Kennedy [2002]. 779
Despite reaching TRL 5–6, TransHab was cancelled by Congressional action (HR 1654, 780
2000). The technology investment was preserved through patent licensing to Bigelow Aerospace, 781
which continued development commercially Kennedy [2002]. 782
4.1.3 Genesis and BEAM: Orbital Validation (2006–2016+) 783
Bigelow Aerospace launched Genesis I (2006) and Genesis II (2007) as uncrewed orbital test 784
modules, demonstrating pressure retention (69.6–72.4 kPa for Genesis II) and thermal per- 785
formance (average 26°C, range 4.5–32°C for Genesis I) over 2.5+ years Litteken [2019]. These 786
missions validated the TransHab-derived shell architecture in the actual orbital environment 787
for the first time. 788
The Bigelow Expandable Activity Module (BEAM), launched to the International Space 789
Station in April 2016, represents the culmination of this heritage. BEAM provides 16 m3 of 790
habitable volume at a mass of 1,415 kg (88 kg/m3), compared to 137 kg/m3 for the Columbus 791
module and 205 kg/m3 for the Tranquility node Valle et al. [2019a]. While BEAM’s mass- 792
per-volume ratio is higher than TransHab’s projected 39 kg/m3—reflecting BEAM’s small 793
size and relatively heavy end-fittings—the comparison to metallic modules demonstrates the 794
efficiency advantage of fabric-walled construction Valle et al. [2019a]. 795
BEAM’s deployment provided a critical engineering lesson. Initial expansion attempts 796
failed, and the module required 25 short pressure bursts over approximately 7 hours to 797
achieve full deployment—in contrast to the planned rapid inflation sequence NASA Johnson 798
Space Center [2017]. The root cause was attributed to softgoods layers adhering after years 799
of compression in the launch configuration. For future free-flying deep-space modules where 800
ISS crew intervention would not be available, this deployment failure mode must be resolved 801
through autonomous inflation protocols. 802
After its planned two-year demonstration, BEAM’s mission was extended to at least 2028. 803
The module has been converted to active cargo storage (approximately 130 cargo transfer 804
bags), demonstrating practical volumetric value beyond its test objectives NASA Johnson 805
Space Center [2017]. No pressure loss, structural degradation, or significant MMOD impacts 806
have been recorded in over eight years of operation. The Distributed Impact Detection 807
System (DIDS) has continuously monitored for debris impacts throughout the mission. 808
4.2 Current Commercial Programs: LIFE, Orbital Reef, and Be- 809
yond 810
4.2.1 Sierra Space LIFE 811
The Large Integrated Flexible Environment (LIFE) programme by Sierra Space represents 812
the most advanced current inflatable habitat development. The programme has conducted 813
a systematic Ultimate Burst Pressure (UBP) test campaign at NASA Marshall Space Flight 814
Center, producing two landmark results Sierra Space Corporation [2024]: 815
• January 2024 (full-scale): A full-scale LIFE 285 expandable structure (approx- 816
imately 300 m3, over 6 m tall) burst at 77 psi (531 kPa), exceeding NASA’s rec- 817
ommended threshold of 60.8 psi (4× the 15.2 psi maximum operating pressure per 818
NASA-STD-5001) by 27% Sierra Space Corporation [2024]. 819
• October–November 2024 (1/3 scale): The LIFE 10 module burst at 255 psi 820
(1,758 kPa), achieving a factor of safety of 16× for LEO operations (at 15.2 psi) and 821
23× for lunar surface operations (at 10.8 psi) Sierra Space Corporation [2024]. 822
The LIFE product line spans three variants: LIFE 10 (∼100 m3 equivalent, 1/3 scale, 823
for lunar surface applications), LIFE 285 (∼300 m3, full-scale, for ISS-attached or free- 824
flying stations), and LIFE 500 (600–1,440 m3, exceeding the total pressurised volume of the 825
ISS) Sierra Space Corporation [2024]. The restraint layer uses Vectran straps manufactured 826
by ILC Dover, the same organisation responsible for TransHab, Mars Exploration Rover, and 827
BEAM softgoods. Sierra Space is partnered with Blue Origin for the Orbital Reef commercial 828
space station, which received a $130M NASA Commercial LEO Destinations (CLD) award 829
in December 2021. An in-space test is targeted for no earlier than 2026. 830
4.2.2 Historical Context: B330 and Commercial Ecosystem Fragility 831
The history of Bigelow Aerospace provides a cautionary counterpoint. The B330 (330 m3, 832
18,500–23,000 kg, 24–36 layers totalling approximately 0.46 m wall thickness Valle et al. 833
[2019a]) was the most advanced commercial inflatable habitat design as of 2019, with a full- 834
scale ground prototype (XBASE) tested under NASA’s NextSTEP programme. The B330’s 835
restraint design used a distinctive hoop webbing approach (US Patent 7,100,874) differing 836
from NASA’s basket-weave architecture Valle et al. [2019a]. 837
Bigelow Aerospace ceased operations in March 2020 following COVID-19 layoffs, and 838
BEAM’s ownership was transferred to NASA JSC in December 2021. The collapse of the 839
most mature commercial inflatable habitat programme illustrates that high TRL does not 840
guarantee commercial viability. Future programmes cannot rely on government safety nets 841
to preserve technology investments, and the commercial ecosystem supporting inflatable 842
habitat development remains fragile. 843
4.2.3 NextSTEP Competitive Landscape 844
NASA’s NextSTEP-2 programme (2016–2019) selected six companies—Bigelow, Boeing, 845
Lockheed Martin, Orbital ATK, Sierra Nevada Corporation, and NanoRacks—to develop 846
habitat prototypes for evaluation NASA [2016]. Lockheed Martin’s inflatable prototype 847
achieved a burst pressure of 285 psi with hundreds of sensors and high-speed cameras mon- 848
itoring the failure Lockheed Martin [2022]. However, this programme subsequently pivoted: 849
the Starlab commercial station (originally Lockheed Martin/NanoRacks) adopted a rigid 850
architecture with Airbus as partner, abandoning the inflatable approach. Of the six original 851
NextSTEP-2 companies, only Sierra Space (evolved from Sierra Nevada Corporation) has 852
continued to develop inflatable habitats. This consolidation, combined with Bigelow’s exit, 853
suggests that the inflatable habitat technology faces unresolved commercialisation challenges 854
that complement the technical risks discussed elsewhere. 855
4.3 Future Concepts: Lunar Surface, Mars Transit, Planetary En- 856
try 857
4.3.1 Lunar Surface Habitats 858
Multiple concepts have been proposed for inflatable habitats on the lunar surface, where 859
the reduced gravity (1/6 g) and absence of orbital debris shift the design requirements 860
from MMOD protection toward radiation shielding and dust management. The ESA-Hassell 861
collaboration has designed a scalable inflatable pod system at the Shackleton Crater (lunar 862
south pole), partially constructed from lunar regolith via 3D printing and expandable to 863
house up to 144 people Hassell Studio and European Space Agency [2024]. The ESA-SOM 864
Moon Village concept proposes a semi-inflatable shell that doubles its internal volume upon 865
deployment, supporting a four-person crew for up to 300 days Skidmore, Owings & Merrill 866
and European Space Agency [2019]. The ESA Pneumocell concept is specifically designed 867
for burial under 4–5 m of regolith, using the lunar soil itself as radiation shielding European 868
Space Agency [2018]—an elegant solution that leverages the inflatable structure’s compliance 869
to conform to the excavated cavity. 870
For lunar operations, the MMOD layer that constitutes approximately 68% of the shell 871
mass in LEO Valle et al. [2019a] can be substantially reduced or eliminated, offering signifi- 872
cant mass savings. However, lunar dust intrusion and abrasion present a new challenge for 873
flexible fabric surfaces that has not been addressed in any inflatable habitat design to date. 874
4.3.2 Mars Transit and Surface Applications 875
TransHab was originally conceived as a Mars transit vehicle, and the deep-space habitat 876
architecture inherits directly from this heritage. Valle et al. Valle et al. [2019a] present a 877
launch-to-activation deployment flowchart for a deep-space inflatable habitat, identifying key 878
operational challenges: autonomous deployment without crew intervention, up to 4 kW of 879
heater power required post-inflation to bring the bladder above minimum operating tem- 880
perature, and up to 24 hours before crew entry is permitted. For a three-year Mars transit 881
mission at solar minimum with three solar particle events (SPEs), radiation shielding re- 882
quirements range from 25 cm to 400 cm of water equivalent depending on the allowable bone 883
marrow dose Valle et al. [2019a]—a significant design driver discussed further in Section 4.4. 884
Mars surface applications extend to entry systems. The Low-Earth Orbit Flight Test of 885
an Inflatable Decelerator (LOFTID, 2022) demonstrated a 6 m diameter inflatable aerodecel- 886
erator at Mach 30 during orbital reentry NASA [2022], achieving TRL 7–8 and establishing 887
the viability of inflatable heat shields for planetary entry. The Inflatable Reentry Vehicle 888
Experiment (IRVE-II, 2009) had previously validated a 3 m prototype in suborbital flight Lit- 889
teken [2019]. For Mars, where the thin atmosphere limits the effectiveness of parachutes for 890
large payloads, inflatable aerodecelerators offer the only viable path to landing human-scale 891
masses (>20 tonnes) on the surface. More exotic concepts include the HAVOC Venus air- 892
ship and the Titan Aerover blimp, both leveraging inflatable structures for buoyancy-based 893
exploration Litteken [2019]. 894
4.3.3 European Programmes 895
European contributions to inflatable habitat development include the ASI-funded FLECS 896
(Flexible Commercial Structure), the ESA-funded IHAB (Inflatable Habitation) and IMOD 897
(Inflatable Module) programmes, and the 2002 ESA/ESTEC First European Workshop 898
on Inflatable Space Structures (ESA-WPP-200) ESA/ESTEC [2002]. These programmes 899
have contributed materials characterisation, hypervelocity impact testing of flexible MMOD 900
shields (notably Destefanis et al. Destefanis et al. [2006]), and architectural concepts. How- 901
ever, it must be noted that no European inflatable has flown in a habitation role. After 902
more than two decades of investment, all European inflatable habitat programmes remain at 903
TRL 2–4. The Volga airlock (1965) remains the only European-adjacent (Soviet-era) flight 904
precedent for a human-rated inflatable in space. 905
4.4 Radiation Shielding: The BEAM SPE Findings and Design Im- 906
plications 907
Radiation shielding represents the single most serious unresolved technical challenge for 908
inflatable habitats in deep space. The BEAM module has provided the only in-flight radiation 909
data for an inflatable habitat, and the findings demand honest assessment. 910
During the September 2017 solar particle event (SPE), radiation dosimeters inside BEAM 911
recorded approximately 2–2.5 mGy, compared to approximately 0.25 mGy measured in typ- 912
ical ISS metallic habitable modules during the same event—a ratio of 8–10× higher dose 913
inside the inflatable module NASA Johnson Space Center [2017]. For galactic cosmic ra- 914
diation (GCR), which is continuous rather than episodic, BEAM dose rates were similar 915
to other ISS modules at baseline, indicating that the fabric shell provides adequate GCR 916
shielding in LEO where the Earth’s magnetic field supplies primary protection. 917
The SPE finding has significant implications: 918
• Fabric walls alone are insufficient for SPE protection. The multi-layer shell 919
(60+ individual layers, 30–50 cm total thickness) provides substantially less shielding 920
than the aluminium structure of ISS modules during particle events. 921
• The mitigation is designed-in, not absent. Both TransHab and the LIFE archi- 922
tecture incorporate a rigid central core functioning as a storm shelter during SPEs. 923
Crew quarters are positioned within this core, surrounded by water wall containers 924
(a concept originating with Kennedy’s TransHab design Kennedy [2002]) that provide 925
effective hydrogen-rich shielding. The inflatable volume provides habitable space for 926
non-storm operations, while the rigid core provides radiation protection. 927
• Material selection matters. Polyethylene provides 27.8% mass savings compared to 928
aluminium for equivalent radiation shielding effectiveness, and three-layer composite 929
shields (combining high-Z, medium-Z, and low-Z materials) achieve up to 70% total 930
ionising dose improvement for electrons and 50% for protons Wang et al. [2025]. 931
For deep-space missions beyond Earth’s magnetosphere, the GCR environment is more 932
severe and continuous. Valle et al. Valle et al. [2019a] model that a three-year deep-space 933
mission at solar minimum with three SPEs requires between 25 cm and 400 cm of water- 934
equivalent shielding depending on the allowable bone marrow dose—translating to substan- 935
tial mass within the rigid core. Active magnetic shielding and pharmaceutical countermea- 936
sures remain at low TRL and are not viable near-term solutions. 937
The honest framing is that inflatable habitats are not radiation protection structures, 938
and were never designed to be. They are mass-efficient volume structures with integrated 939
MMOD protection. Radiation protection is the responsibility of the rigid core and water wall 940
architecture. The BEAM SPE data confirms this design philosophy rather than undermining 941
it, but the data must be presented without minimisation to maintain credibility with the 942
radiation protection community. The absence of post-2017 follow-up publications detailing 943
BEAM’s continued radiation environment data over its now eight-year mission represents a 944
gap in the available evidence base that future studies should address. 945
5 State of the Art: Materials and Structures 946
The material systems underpinning inflatable space structures occupy a unique design space: 947
they must combine the tensile strength of structural metals, the flexibility to package into 948
compact launch volumes, and the environmental durability to survive atomic oxygen, ultra- 949
violet radiation, and micrometeoroid impacts for mission lifetimes spanning years to decades. 950
This section reviews the four dominant fabric families, the canonical multi-layer shell archi- 951
tecture derived from TransHab, established rigidisation technologies, and the environmental 952
degradation mechanisms that govern long-term performance. 953
5.1 Space-Rated Fabrics: Vectran, Kevlar, Zylon, Nextel 954
Four high-performance fabric families dominate inflatable space structure design, each oc- 955
cupying a distinct functional niche determined by the intersection of mechanical properties, 956
environmental tolerance, and flight heritage. 957
Vectran HT (liquid crystal polymer, Kuraray Co.) has emerged as the preferred ma- 958
terial for restraint layers in inflatable habitats. With a tensile strength of approximately 959
3.0 GPa at a density of 1.40 g/cm3, Vectran achieves a specific strength of 2,330 kN·m/kg— 960
an order of magnitude above Ti-6Al-4V (220 kN·m/kg) and Al 7075 (204 kN·m/kg) Valle 961
et al. [2019b]. Vectran’s principal advantage over the earlier-generation Kevlar is its superior 962
creep resistance: under sustained load at the NASA-mandated factor of safety of 4.0 (corre- 963
sponding to 25% of ultimate tensile strength), Vectran fabric exhibits no failure over extended 964
test periods of months Weadon [2013]. This characteristic is critical because creep is the life- 965
limiting mechanism for restraint layers in pressure-stabilised structures. However, Weadon’s 966
systematic characterisation revealed that time-to-failure is exponentially sensitive to load 967
level, and manufacturing variability in ultimate tensile strength (±10% for 12K webbing, 968
±6% for 6K webbing) introduces significant uncertainty in lifetime prediction—at 75–85% 969
UTS, time-to-failure ranges from 4 minutes to 5.5 months for identical test configurations 970
Weadon [2013]. This finding underscores the importance of quality control in inflatable 971
habitat fabrication. Two important qualifications must be noted. First, Weadon’s creep 972
characterisation was conducted at room temperature; no published Vectran creep dataset 973
exists for space-representative thermal cycling conditions (approximately −100◦C to +120◦C 974
for LEO), and the effective creep rate under such cycling may differ significantly from room- 975
temperature data—this represents a critical materials gap for habitat lifetime prediction. 976
Second, the “no failure over extended test periods” result at 25% UTS, while encouraging, is 977
based on a limited number of specimens at the design operating point; given the wide man- 978
ufacturing variability, confidence intervals on lifetime prediction remain large, and the creep 979
behaviour exhibits bimodal characteristics where some specimens show substantially earlier 980
failure than others at identical load levels. Vectran’s flight heritage includes Mars Pathfinder 981
airbags (1997), BEAM restraint layers (2016–present), and the Sierra Space LIFE program 982
Litteken [2019]. 983
Kevlar 49 (poly-paraphenylene terephthalamide, DuPont) was the original restraint 984
layer material for TransHab, with a tensile strength of approximately 3.0 GPa at the fabric 985
level and 3.6 GPa at the individual filament level, at a density of 1.44 g/cm3 Valle et al. 986
[2019b], DuPont [2019]. The corresponding specific strength is 2,080 kN·m/kg (fabric) or 987
2,500 kN·m/kg (filament); throughout this survey, fabric-level properties are reported un- 988
less otherwise noted, as these are the engineering-relevant values for woven restraint layers. 989
While Kevlar’s fabric-level specific strength is comparable to Vectran’s, its higher creep rate 990
under sustained biaxial loading led to its replacement by Vectran in subsequent habitat de- 991
signs Kennedy [2002]. Kevlar retains an important role as a rear-wall material in multi-layer 992
micrometeoroid and orbital debris (MMOD) shields, where its combination of high energy 993
absorption and relatively low cost makes it the material of choice for fragment capture layers 994
Destefanis et al. [2003]. Space environment characterisation by Destefanis et al. confirmed 995
that Kevlar suffers UV-induced discoloration and embrittlement but shows acceptable perfor- 996
mance when shielded from direct solar exposure within the MMOD sub-assembly Destefanis 997
et al. [2009]. 998
Zylon (poly-p-phenylene-2,6-benzobisoxazole, PBO; Toyobo Co.) offers the highest ten- 999
sile strength of any commercially available high-performance fibre at 5.8 GPa, yielding a 1000
specific strength of 3,840 kN·m/kg Toyobo Co., Ltd. [2005]. However, Zylon exhibits catas- 1001
trophic UV degradation: strength loss of approximately 35% within 6 months of unshielded 1002
exposure, rendering it unsuitable for any application without comprehensive UV protec- 1003
tion Toyobo Co., Ltd. [2005], Said et al. [2006]. Despite this limitation, Zylon has found 1004
niche space applications where UV shielding is inherently provided: SpaceX Crew Dragon 1005
parachute risers and NASA high-altitude balloon tendons Litteken [2019]. For inflatable 1006
structures, Zylon could serve in interior tensile elements (e.g., floor suspension webbings 1007
within pressurised habitats) where the multi-layer shell provides UV shielding, but its UV 1008
sensitivity effectively precludes use in any externally exposed role. 1009
Nextel 440 (3M alumina-boria-silica ceramic fabric) occupies a unique position as the 1010
only ceramic fibre used in inflatable space structures. With a density of 3.05 g/cm3 and con- 1011
tinuous use temperature of 1370◦C, Nextel is employed exclusively as the outer bumper layer 1012
in MMOD shielding Christiansen et al. [2019], Destefanis et al. [2003]. Upon hyperveloc- 1013
ity impact, Nextel fragments incoming particles into smaller, more widely dispersed debris, 1014
reducing the energy density impinging on subsequent shield layers. The stuffed Whipple 1015
configuration (Nextel bumper + open-cell foam + Kevlar rear wall) protects against projec- 1016
tiles approximately twice the diameter of those defeated by a standard aluminium Whipple 1017
shield at equal areal density Destefanis et al. [2003]. Nextel is inherently immune to UV and 1018
atomic oxygen degradation due to its ceramic composition, but its high density limits its use 1019
to the thin bumper layer. 1020
Two additional materials complete the palette for inflatable structures. Beta cloth 1021
(PTFE-coated fibreglass) serves as the outermost atomic oxygen protection cover layer, with 1022
LDEF flight data demonstrating excellent durability over 68 months of LEO exposure Pippin 1023
et al. [1993], Banks et al. [2004]. Kapton H (polyimide, DuPont) is the workhorse film for 1024
multi-layer insulation, operating from −269◦C to +400◦C, though it is susceptible to atomic 1025
oxygen erosion at a rate of 3.0×10−24 cm3/atom Banks et al. [2004], Finckenor and Dooling 1026

[1999]. 1027
Table 8 presents a comprehensive comparison of these material systems across eight 1028
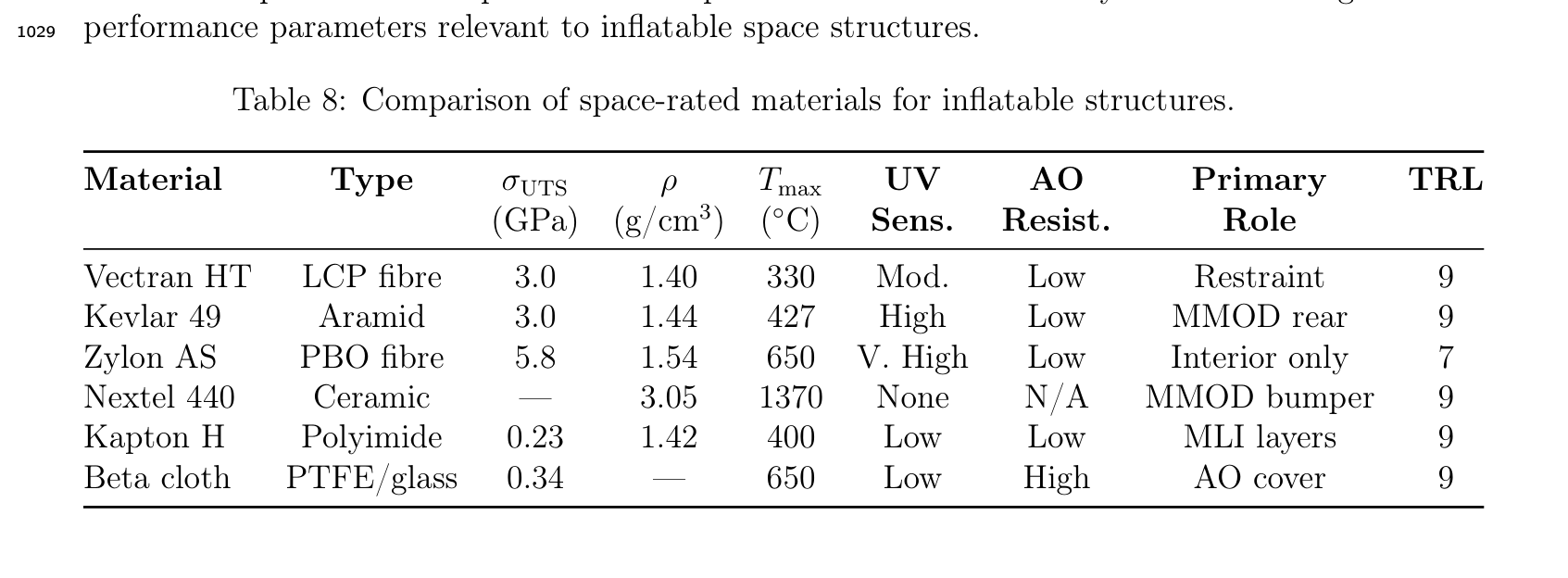
performance parameters relevant to inflatable space structures. 1029
Table 8: Comparison of space-rated materials for inflatable structures.
Material Type σUTS ρ Tmax UV AO Primary TRL (GPa) (g/cm3) (◦C) Sens. Resist. Role
Vectran HT LCP fibre 3.0 1.40 330 Mod. Low Restraint 9 Kevlar 49 Aramid 3.0 1.44 427 High Low MMOD rear 9 Zylon AS PBO fibre 5.8 1.54 650 V. High Low Interior only 7 Nextel 440 Ceramic — 3.05 1370 None N/A MMOD bumper 9 Kapton H Polyimide 0.23 1.42 400 Low Low MLI layers 9 Beta cloth PTFE/glass 0.34 — 650 Low High AO cover 9
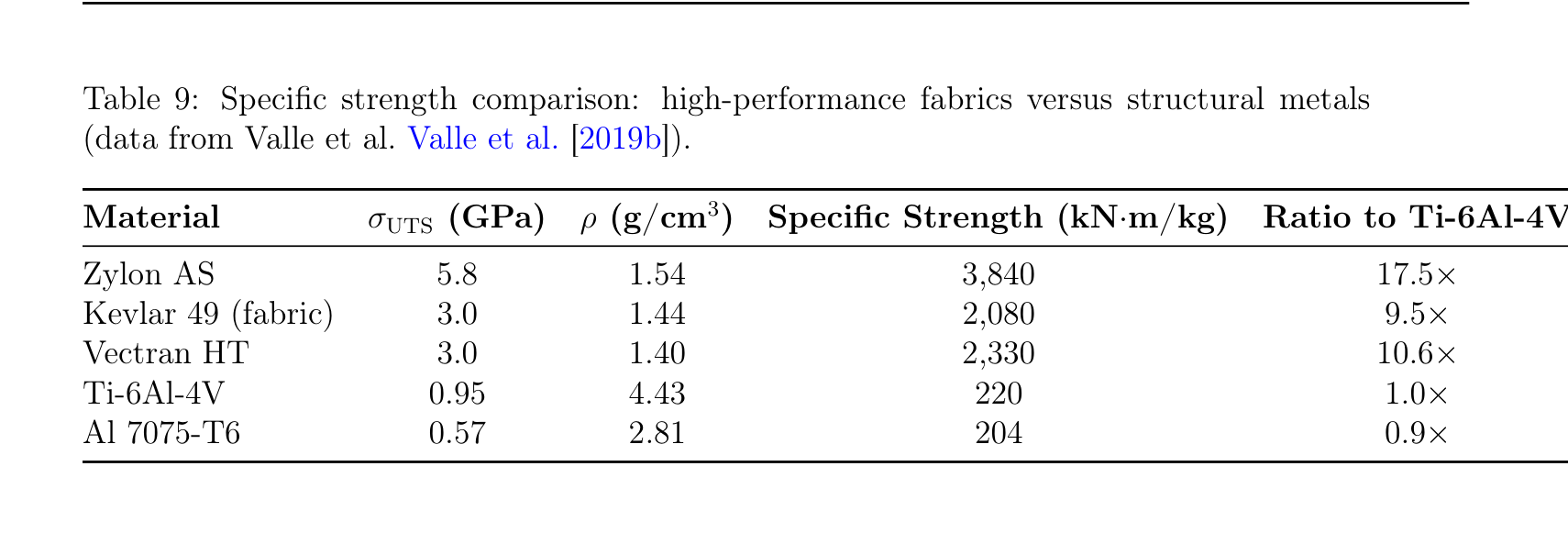
Table 9: Specific strength comparison: high-performance fabrics versus structural metals (data from Valle et al. Valle et al. [2019b]).
Material σUTS (GPa) ρ (g/cm3) Specific Strength (kN·m/kg) Ratio to Ti-6Al-4V
Zylon AS 5.8 1.54 3,840 17.5× Kevlar 49 (fabric) 3.0 1.44 2,080 9.5× Vectran HT 3.0 1.40 2,330 10.6× Ti-6Al-4V 0.95 4.43 220 1.0× Al 7075-T6 0.57 2.81 204 0.9×
High-performance
High-perf. fabric
fabrics
Structural metal
Ceramic
Zylon AS
Polymer film
Kevlar 49
Specific strength (kN·m/kg)
Vectran HT
103
Ceramics
Nextel 440
Ti-6Al-4V
Kapton H
Al 7075-T6
Structural metals
102
200 400 600 800 1000 1200 1400 1600 Maximum service temperature (°C)
Figure 4: Materials Ashby chart comparing specific strength versus maximum service tem- perature for space-rated fabrics and structural metals. High-performance fabrics (Vec- tran, Kevlar, Zylon) occupy a design space inaccessible to metals, combining an order- of-magnitude advantage in specific strength with adequate thermal performance for LEO applications.
5.2 Multi-Layer Shell Architecture 1030
The TransHab program (1997–2000) established the canonical five-layer shell architecture 1031
that remains the reference design for all subsequent inflatable habitats Kennedy [2002, 2016]. 1032
From innermost to outermost, the layers are: 1033
1. Liner: Nomex fabric backed by Kevlar felt provides the crew-contact interior surface, 1034
offering acoustic attenuation and a substrate for equipment mounting. 1035
2. Bladder: Three redundant layers of polymeric gas barrier (Combitherm or urethane- 1036
coated Nylon), each sandwiched between Kevlar felt separators. The bladder is deliber- 1037
ately oversized relative to the restraint layer so that it carries no structural load—the 1038
positive pressure differential is transmitted entirely to the restraint layer Kennedy 1039
[2016]. The triple redundancy ensures continued pressure containment after a single- 1040
layer puncture. 1041
3. Restraint layer: The primary load-carrying element, comprising Kevlar (TransHab) 1042
or Vectran (BEAM and subsequent designs) in a biaxial basket-weave configuration. 1043
TransHab’s restraint layer was designed to sustain 12,500 lb/in hoop loading and 1044
6,000 lb/in axial loading at a factor of safety of 4.0 per NASA-STD-5001 Kennedy 1045
[2016]. The restraint layer attaches to rigid bulkheads via clevis fittings that transfer 1046
membrane loads to the metallic core structure. Ground testing demonstrated sustained 1047
pressure at 4× operating pressure (60 psid) without failure, and burst at 196 psid in 1048
sub-scale articles Kennedy [2002]. 1049
4. MMOD shield: A stuffed Whipple configuration comprising Nextel 440 ceramic fab- 1050
ric bumper layers, open-cell polyurethane foam spacers, and Kevlar rear walls Deste- 1051
fanis et al. [2003]. The MMOD assembly is vacuum-packed during launch to maintain 1052
the folded configuration and expands passively on orbit when exposed to vacuum. 1053
TransHab’s MMOD design was tested against projectiles up to 1.7 cm diameter at 1054
hypervelocity, meeting the no-penetration probability requirement of PNP ≥0.9820 1055
Kennedy [2002]. Damage tolerance testing by Valle et al. demonstrated that a 2 in × 1056
3.5 in hole in the restraint layer at 25% of burst pressure resulted in load redistribution 1057
without catastrophic failure—an inherent advantage of woven textile structures over 1058
metallic shells Valle et al. [2009]. 1059
5. Thermal protection system (TPS): Multi-layer insulation comprising nylon-reinforced 1060
double-aluminized Mylar and double-aluminized Kapton layers, with inner layers perfo- 1061
rated for gas venting during deployment Finckenor and Dooling [1999]. The outermost 1062
element is an atomic oxygen cover of Beta glass fabric for LEO operations Kennedy 1063
[2016]. Effective emittance values for properly installed MLI range from 0.015 to 0.05, 1064
though practical performance with seams, penetrations, and attachment hardware typ- 1065
ically falls at the upper end of this range Finckenor and Dooling [1999], Gilmore [2002]. 1066
TransHab / BEAM Shell Architecture
(five functional sub-assemblies, not to scale)
Exterior (space environment)
AO protection cover
(Beta cloth) Atomic oxygen barrier
4. Thermal Protection
MLI blankets (Kapton + Dacron) Thermal insulation
Sub-assembly
MMOD: Nextel + Kevlar
(Stuffed Whipple) Projectile fragmentation
3. MMOD Shield
Sub-assembly
MMOD: Open-cell foam
(Solimide) Energy absorption
Restraint layer (Vectran webbing) Primary structural element
2. Restraint Sub-assembly
Bladder (Combitherm film) Gas barrier
Liner (Nomex/Kevlar felt) Crew-contact surface
1. Liner
Interior (pressurised)
Figure 5: TransHab/BEAM multi-layer shell architecture, showing the five functional sub- assemblies from the crew-contact liner (innermost) to the atomic oxygen protection cover (outermost). The restraint layer (Vectran basket-weave) carries all pressure loads; the blad- der, MMOD shield, and thermal protection system are non-structural. Total deployed thick- ness: 30–50 cm; total number of individual layers: 60+.
The total shell assembly comprises 60+ individual layers deployed to a thickness of 30– 1067
50 cm Valle et al. [2019b]. For TransHab, the overall packaged dimensions were 10.5 m length 1068
with a deployed width of 8.3 m, yielding an internal habitable volume of approximately 1069
161 m3 and a total packaged shell volume of 329 m3 Kennedy [2016]. BEAM, the flight- 1070
demonstrated derivative, achieves a habitable volume of 16 m3 in a 1,415 kg module Valle 1071
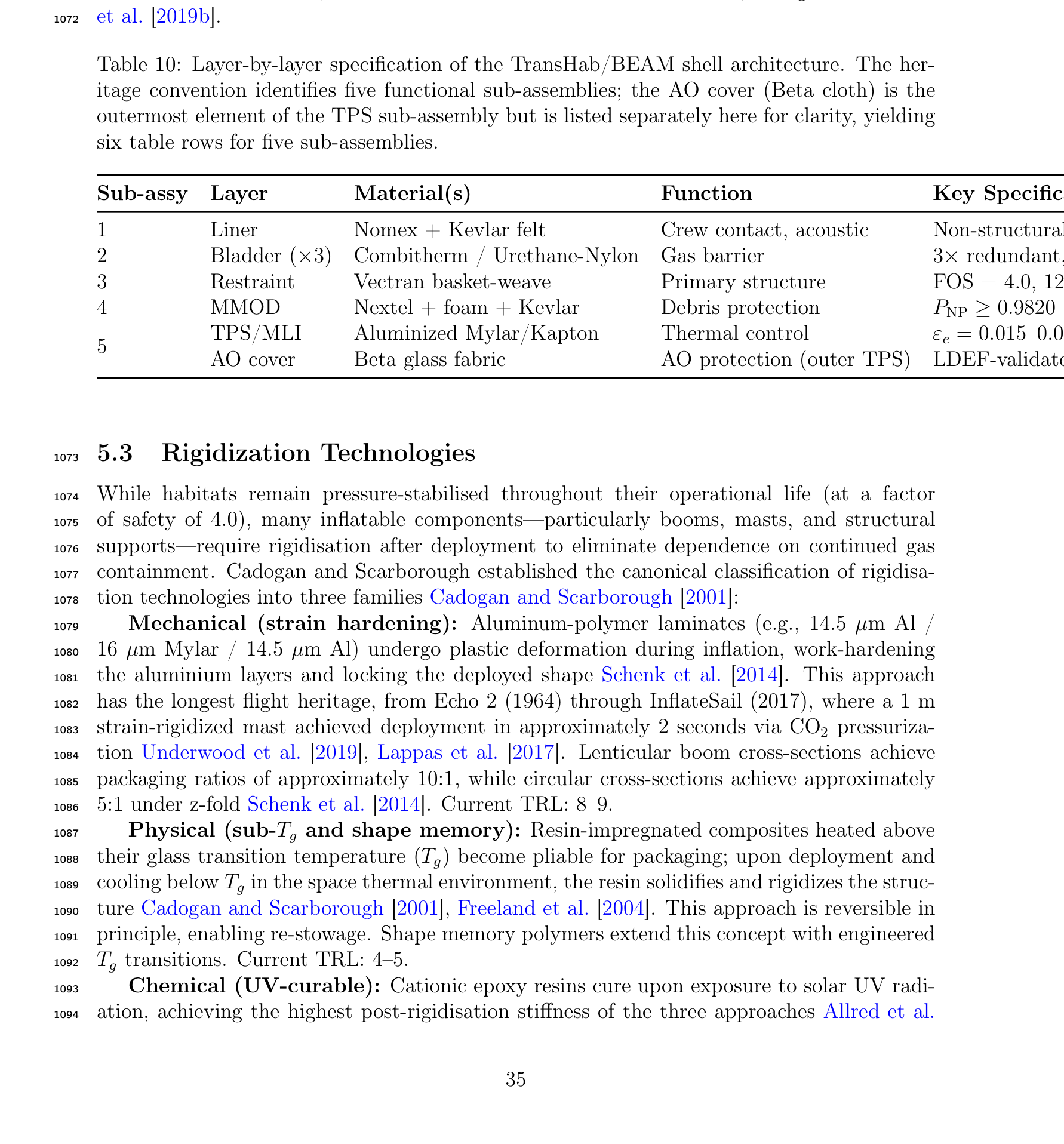
et al. [2019b]. 1072
Table 10: Layer-by-layer specification of the TransHab/BEAM shell architecture. The her- itage convention identifies five functional sub-assemblies; the AO cover (Beta cloth) is the outermost element of the TPS sub-assembly but is listed separately here for clarity, yielding six table rows for five sub-assemblies.
Sub-assy Layer Material(s) Function Key Specifica
1 Liner Nomex + Kevlar felt Crew contact, acoustic Non-structural 2 Bladder (×3) Combitherm / Urethane-Nylon Gas barrier 3× redundant, 3 Restraint Vectran basket-weave Primary structure FOS = 4.0, 12 4 MMOD Nextel + foam + Kevlar Debris protection PNP ≥0.9820
5 TPS/MLI Aluminized Mylar/Kapton Thermal control εe = 0.015–0.0 AO cover Beta glass fabric AO protection (outer TPS) LDEF-validate
5.3 Rigidization Technologies 1073
While habitats remain pressure-stabilised throughout their operational life (at a factor 1074
of safety of 4.0), many inflatable components—particularly booms, masts, and structural 1075
supports—require rigidisation after deployment to eliminate dependence on continued gas 1076
containment. Cadogan and Scarborough established the canonical classification of rigidisa- 1077
tion technologies into three families Cadogan and Scarborough [2001]: 1078
Mechanical (strain hardening): Aluminum-polymer laminates (e.g., 14.5 µm Al / 1079
16 µm Mylar / 14.5 µm Al) undergo plastic deformation during inflation, work-hardening 1080
the aluminium layers and locking the deployed shape Schenk et al. [2014]. This approach 1081
has the longest flight heritage, from Echo 2 (1964) through InflateSail (2017), where a 1 m 1082
strain-rigidized mast achieved deployment in approximately 2 seconds via CO2 pressuriza- 1083
tion Underwood et al. [2019], Lappas et al. [2017]. Lenticular boom cross-sections achieve 1084
packaging ratios of approximately 10:1, while circular cross-sections achieve approximately 1085
5:1 under z-fold Schenk et al. [2014]. Current TRL: 8–9. 1086
Physical (sub-Tg and shape memory): Resin-impregnated composites heated above 1087
their glass transition temperature (Tg) become pliable for packaging; upon deployment and 1088
cooling below Tg in the space thermal environment, the resin solidifies and rigidizes the struc- 1089
ture Cadogan and Scarborough [2001], Freeland et al. [2004]. This approach is reversible in 1090
principle, enabling re-stowage. Shape memory polymers extend this concept with engineered 1091
Tg transitions. Current TRL: 4–5. 1092
Chemical (UV-curable): Cationic epoxy resins cure upon exposure to solar UV radi- 1093
ation, achieving the highest post-rigidisation stiffness of the three approaches Allred et al. 1094
[2002]. The Rigidization on Command (ROC) technology demonstrated by Adherent Tech- 1095
nologies achieves mechanical properties equivalent to thermally cured composites using sun- 1096
light alone Adherent Technologies Inc. [2001]. However, UV curing requires unobstructed 1097
solar access and is sensitive to shadowing by other spacecraft elements. Current TRL: 4–5. 1098
An emerging fourth approach uses shape memory alloy (SMA) elements integrated into 1099
inflatable toroidal structures. Patel et al. developed an analytical framework for SMA-based 1100
rigidisation where NiTi alloy wires, embedded in the inflatable wall and heated above their 1101
austenite finish temperature, contract and lock the deployed geometry Patel et al. [2024]. 1102
This approach remains at the analytical stage (TRL 2–3) but offers the potential for active 1103
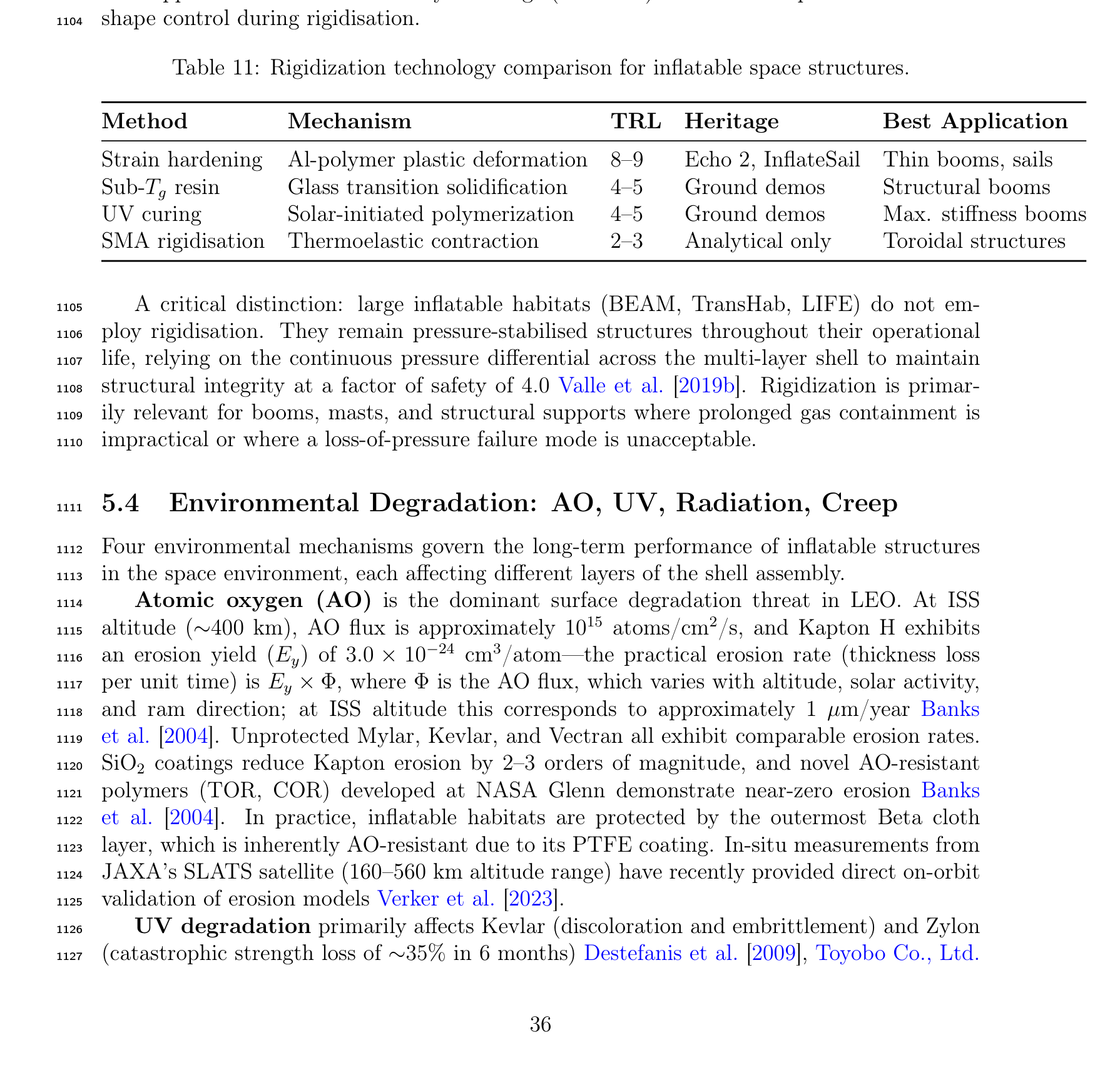
shape control during rigidisation. 1104
Table 11: Rigidization technology comparison for inflatable space structures.
Method Mechanism TRL Heritage Best Application
Strain hardening Al-polymer plastic deformation 8–9 Echo 2, InflateSail Thin booms, sails Sub-Tg resin Glass transition solidification 4–5 Ground demos Structural booms UV curing Solar-initiated polymerization 4–5 Ground demos Max. stiffness booms SMA rigidisation Thermoelastic contraction 2–3 Analytical only Toroidal structures
A critical distinction: large inflatable habitats (BEAM, TransHab, LIFE) do not em- 1105
ploy rigidisation. They remain pressure-stabilised structures throughout their operational 1106
life, relying on the continuous pressure differential across the multi-layer shell to maintain 1107
structural integrity at a factor of safety of 4.0 Valle et al. [2019b]. Rigidization is primar- 1108
ily relevant for booms, masts, and structural supports where prolonged gas containment is 1109
impractical or where a loss-of-pressure failure mode is unacceptable. 1110
5.4 Environmental Degradation: AO, UV, Radiation, Creep 1111
Four environmental mechanisms govern the long-term performance of inflatable structures 1112
in the space environment, each affecting different layers of the shell assembly. 1113
Atomic oxygen (AO) is the dominant surface degradation threat in LEO. At ISS 1114
altitude (∼400 km), AO flux is approximately 1015 atoms/cm2/s, and Kapton H exhibits 1115
an erosion yield (Ey) of 3.0 × 10−24 cm3/atom—the practical erosion rate (thickness loss 1116
per unit time) is Ey × Φ, where Φ is the AO flux, which varies with altitude, solar activity, 1117
and ram direction; at ISS altitude this corresponds to approximately 1 µm/year Banks 1118
et al. [2004]. Unprotected Mylar, Kevlar, and Vectran all exhibit comparable erosion rates. 1119
SiO2 coatings reduce Kapton erosion by 2–3 orders of magnitude, and novel AO-resistant 1120
polymers (TOR, COR) developed at NASA Glenn demonstrate near-zero erosion Banks 1121
et al. [2004]. In practice, inflatable habitats are protected by the outermost Beta cloth 1122
layer, which is inherently AO-resistant due to its PTFE coating. In-situ measurements from 1123
JAXA’s SLATS satellite (160–560 km altitude range) have recently provided direct on-orbit 1124
validation of erosion models Verker et al. [2023]. 1125
UV degradation primarily affects Kevlar (discoloration and embrittlement) and Zylon 1126
(catastrophic strength loss of ∼35% in 6 months) Destefanis et al. [2009], Toyobo Co., Ltd. 1127
[2005]. Vectran shows moderate UV sensitivity. The multi-layer shell architecture naturally 1128
provides UV shielding for interior layers, but any externally exposed fabric elements require 1129
dedicated UV protection. 1130
Radiation effects on high-performance fabrics are comparatively modest for LEO mis- 1131
sions. The primary radiation concern for inflatable habitats is crew dose rather than material 1132
degradation—BEAM measurements during a September 2017 solar particle event recorded 1133
2–2.5 mGy inside BEAM versus approximately 0.25 mGy in adjacent ISS metallic modules, 1134
an 8–10× ratio attributable to the lower areal density of the fabric shell NASA Johnson Space 1135
Center [2017]. Polyethylene/aluminium composite shielding saves at least 27.8% of shielding 1136
mass compared to aluminium-only structures, and multi-layer configurations achieve up to 1137
70% total ionizing dose improvement for electrons and 50% for protons Wang et al. [2025]. 1138
Creep is the life-limiting mechanism for Vectran and Kevlar restraint layers under sus- 1139
tained biaxial pressure loading. Weadon’s characterisation demonstrated three-stage vis- 1140
coelastic creep with exponential sensitivity to the ratio of applied load to ultimate tensile 1141
strength Weadon [2013]. At the design operating point of 25% UTS (FOS = 4.0), specimens 1142
showed no failure over test periods of months. However, the wide manufacturing variability 1143
in UTS (±10%) dominates lifetime uncertainty—not the average material properties them- 1144
selves. Combined synergistic effects (AO + UV + thermal cycling + sustained load) remain 1145
inadequately characterised, representing a research gap that limits confidence in multi-decade 1146
lifetime predictions for deep-space habitats Zhai et al. [2023]. 1147
6 State of the Art: Deployment Mechanics 1148
The deployment of inflatable structures in the space environment presents a unique engineer- 1149
ing challenge: a large, compliant membrane must transition from a compactly folded launch 1150
configuration to a precise deployed geometry under vacuum conditions where gas dynamics, 1151
thermal gradients, and material memory effects all influence the final state. This section 1152
reviews fold pattern selection, inflation control strategies, and lessons from flight heritage. 1153
6.1 Fold Patterns and Packaging Efficiency 1154
The choice of fold pattern determines deployment reliability, packaging efficiency, and the 1155
number of actuators required for controlled deployment. Three primary pattern families are 1156
employed, each optimised for a different structural geometry. 1157
Miura-ori Miura [1985] is the foundational pattern for flat membrane deployment. The 1158
tessellation of parallelogram facets creates a one-degree-of-freedom rigid-foldable mecha- 1159
nism: the entire membrane deploys via a single actuator force without requiring elastic 1160
deformation of the panels. This property is critical for fragile thin films (metallized My- 1161
lar, ceramic-coated Kapton) that cannot sustain repeated fold stress. The negative Pois- 1162
son’s ratio characteristic—contraction in one direction when extended in the perpendicular 1163
direction—assists controlled deployment by preventing bunching Miura [1985]. Compaction 1164
is theoretically unlimited: an N × M panel array compacts to a stack of 2 panels thick, 1165
achieving compaction ratios of N/2 in each direction. Miura-ori is optimal for solar sails, 1166
antenna reflectors, and drag sails where flat-membrane deployment is required. 1167
For cylindrical structures (booms, masts), Schenk and Guest adapted the Miura- 1168
ori pattern to cylindrical geometry, enabling origami-based compaction of inflatable booms 1169
with geometrically determined deployment kinematics Schenk and Guest [2013], Schenk et al. 1170
[2014]. The z-fold variant offers the simplest implementation and highest packaging ratio but 1171
lower deployment reliability, as individual folds must sequentially release without jamming. 1172
Wrapping (coiling) provides more controlled deployment at lower packaging ratios. The 1173
lenticular boom cross-section achieves ∼10:1 packaging ratios versus ∼5:1 for circular cross- 1174
sections Schenk et al. [2014]. 1175
For habitats, a 7-gore S-fold approach is employed: the bladder and restraint layers 1176
are folded in an S-pattern around the rigid central core, with individual MMOD and MLI 1177
gore panels attached separately Kennedy [2016], Valle et al. [2019b]. The habitat packaging 1178
ratio is substantially lower than for membranes or booms because the rigid core occupies a 1179
significant fraction of the stowed volume. TransHab achieved a stowed-to-deployed volume 1180
ratio of approximately 2.1:1 (habitable volume), while BEAM achieves approximately 4.4:1 1181
(16 m3 deployed / ∼3.6 m3 stowed) Valle et al. [2019b]. 1182
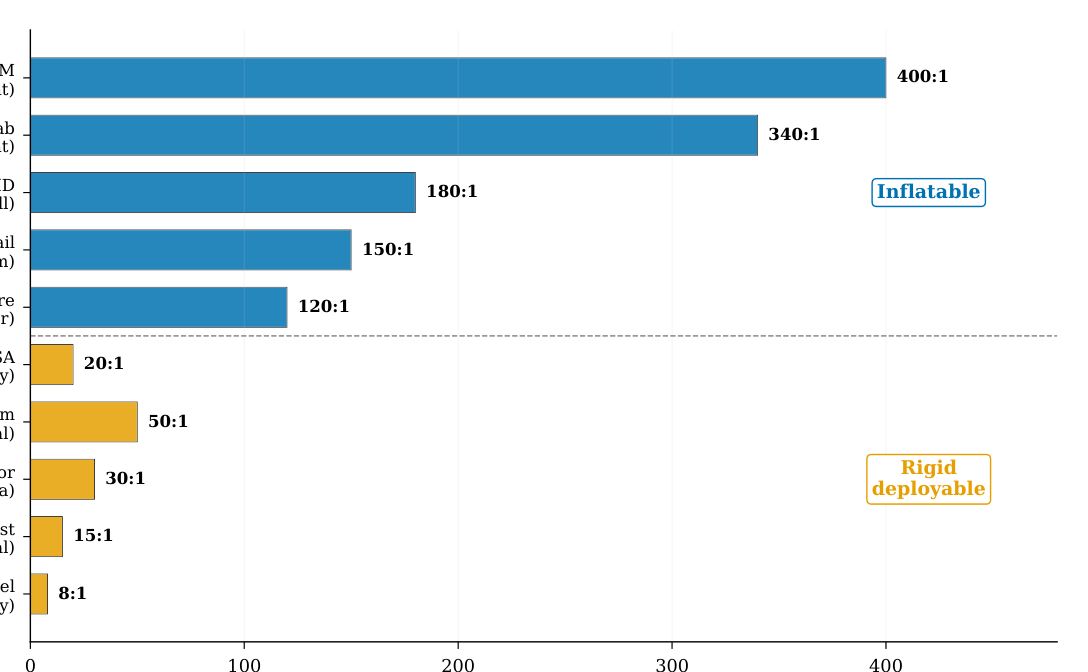
BEAM (habitat)
400:1
TransHab
340:1
(habitat)
LOFTID (aeroshell)
Inflatable
180:1
InflateSail (sail boom)
150:1
PowerSphere
120:1
(power)
ROSA (solar array)
20:1
TRAC boom
50:1
(structural)

Rigid deployable
Mesh reflector
30:1
(antenna)
Coilable mast
15:1
(structural)
Hinged panel
8:1
(solar array)
0 100 200 300 400 Deployed-to-stowed volume ratio
Figure 6: Deployed-to-stowed volume ratio comparison between inflatable and rigid deploy- able structures. Inflatable systems achieve packaging ratios an order of magnitude higher than rigid deployable alternatives, with BEAM demonstrating a 400:1 ratio. Data compiled from mission documentation and manufacturer specifications.
6.2 Inflation Sequencing and Control 1183
Inflation rate control is critical for successful deployment: inflation that is too rapid generates 1184
shock waves in the gas column that can damage thin films and cause asymmetric expansion, 1185
while inflation that is too slow allows thermal gradients to develop that affect the final 1186
geometry Jenkins [2001]. Minimum tension requirements must be maintained throughout 1187
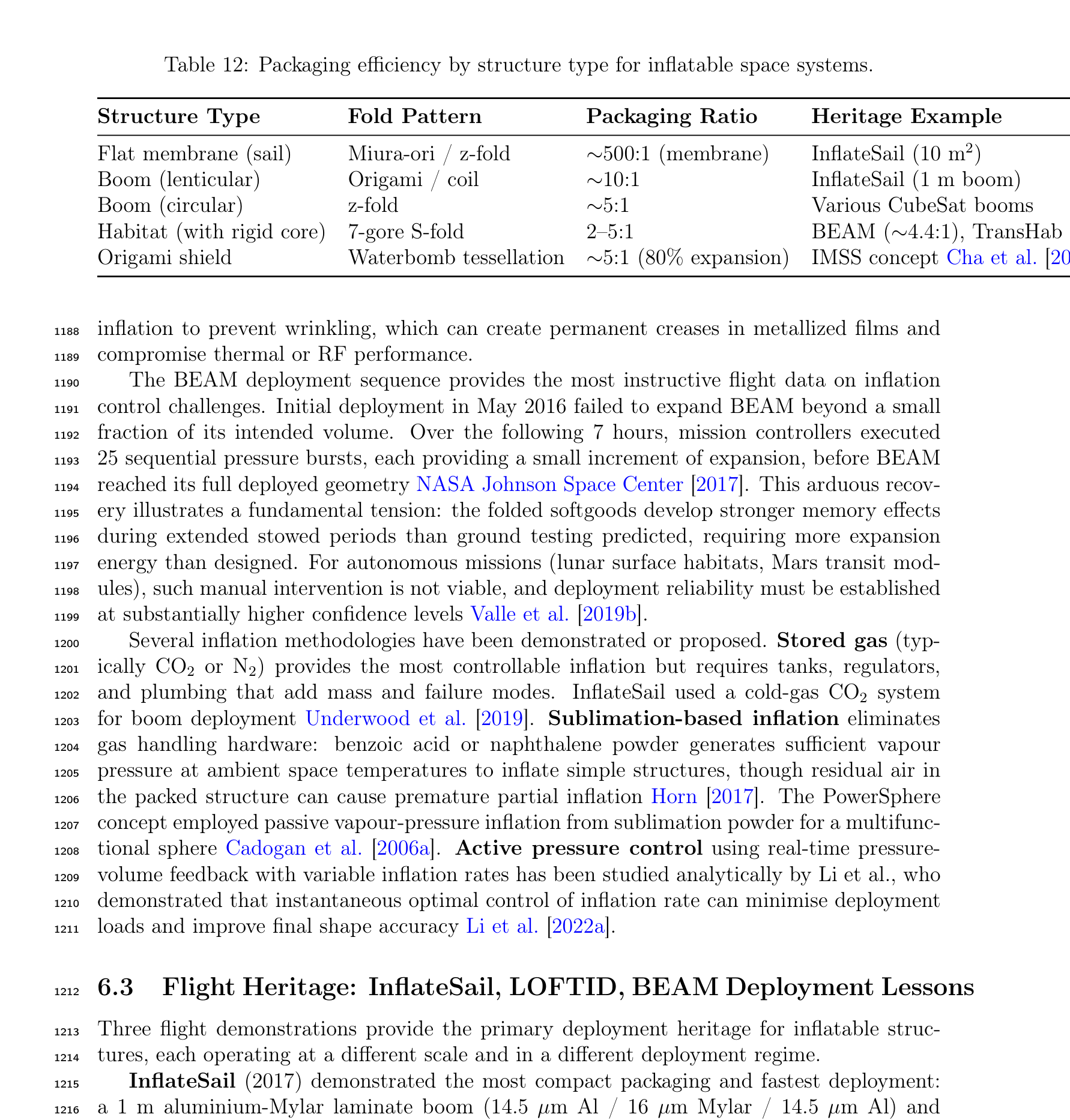
Table 12: Packaging efficiency by structure type for inflatable space systems.
Structure Type Fold Pattern Packaging Ratio Heritage Example
Flat membrane (sail) Miura-ori / z-fold ∼500:1 (membrane) InflateSail (10 m2) Boom (lenticular) Origami / coil ∼10:1 InflateSail (1 m boom) Boom (circular) z-fold ∼5:1 Various CubeSat booms Habitat (with rigid core) 7-gore S-fold 2–5:1 BEAM (∼4.4:1), TransHab Origami shield Waterbomb tessellation ∼5:1 (80% expansion) IMSS concept Cha et al. [20
inflation to prevent wrinkling, which can create permanent creases in metallized films and 1188
compromise thermal or RF performance. 1189
The BEAM deployment sequence provides the most instructive flight data on inflation 1190
control challenges. Initial deployment in May 2016 failed to expand BEAM beyond a small 1191
fraction of its intended volume. Over the following 7 hours, mission controllers executed 1192
25 sequential pressure bursts, each providing a small increment of expansion, before BEAM 1193
reached its full deployed geometry NASA Johnson Space Center [2017]. This arduous recov- 1194
ery illustrates a fundamental tension: the folded softgoods develop stronger memory effects 1195
during extended stowed periods than ground testing predicted, requiring more expansion 1196
energy than designed. For autonomous missions (lunar surface habitats, Mars transit mod- 1197
ules), such manual intervention is not viable, and deployment reliability must be established 1198
at substantially higher confidence levels Valle et al. [2019b]. 1199
Several inflation methodologies have been demonstrated or proposed. Stored gas (typ- 1200
ically CO2 or N2) provides the most controllable inflation but requires tanks, regulators, 1201
and plumbing that add mass and failure modes. InflateSail used a cold-gas CO2 system 1202
for boom deployment Underwood et al. [2019]. Sublimation-based inflation eliminates 1203
gas handling hardware: benzoic acid or naphthalene powder generates sufficient vapour 1204
pressure at ambient space temperatures to inflate simple structures, though residual air in 1205
the packed structure can cause premature partial inflation Horn [2017]. The PowerSphere 1206
concept employed passive vapour-pressure inflation from sublimation powder for a multifunc- 1207
tional sphere Cadogan et al. [2006a]. Active pressure control using real-time pressure- 1208
volume feedback with variable inflation rates has been studied analytically by Li et al., who 1209
demonstrated that instantaneous optimal control of inflation rate can minimise deployment 1210
loads and improve final shape accuracy Li et al. [2022a]. 1211
6.3 Flight Heritage: InflateSail, LOFTID, BEAM Deployment Lessons 1212
Three flight demonstrations provide the primary deployment heritage for inflatable struc- 1213
tures, each operating at a different scale and in a different deployment regime. 1214
InflateSail (2017) demonstrated the most compact packaging and fastest deployment: 1215
a 1 m aluminium-Mylar laminate boom (14.5 µm Al / 16 µm Mylar / 14.5 µm Al) and 1216
10 m2 aluminized Mylar drag sail packaged into a 0.5U volume (∼50 mm cube), deploying 1217
and strain-rigidizing in approximately 2 seconds via CO2 pressurization Underwood et al. 1218
[2019]. The deployed membrane-to-stowed volume ratio of approximately 500:1 represents 1219
the highest documented packaging efficiency for a complete deployable system. InflateSail 1220
de-orbited from 505 km in 72 days, compared to an estimated 4+ years without the sail, 1221
validating the drag deorbit concept at TRL 8–9 Underwood et al. [2019]. 1222
IRVE-3 (Inflatable Reentry Vehicle Experiment, 2012) demonstrated a 3 m diameter in- 1223
flatable aeroshell surviving Mach 10 reentry with peak heating of 14.4 W/cm2 Hughes et al. 1224
[2005]. Its successor, LOFTID (Low-Earth Orbit Flight Test of an Inflatable Decelerator, 1225
2022), scaled this concept to 6 m diameter and survived Mach 30 reentry, achieving TRL 8–9 1226
for inflatable aerodynamic decelerators. These demonstrations establish the thermal protec- 1227
tion performance of flexible fabric systems under extreme heating conditions, confirming that 1228
multi-layer woven ceramic and polymer fabrics can provide thermal protection comparable 1229
to rigid ablative shields at a fraction of the mass. 1230
BEAM (2016–present) provides the definitive deployment lesson for large pressurised 1231
habitats. Beyond the 25-burst recovery described above, BEAM demonstrated that pack- 1232
aged softgoods develop adhesion between layers during extended stowage that significantly in- 1233
creases deployment energy requirements NASA Johnson Space Center [2017]. Post-deployment, 1234
thermal performance was “more benign than predicted” because folded softgoods create addi- 1235
tional insulation beyond the designed MLI performance. BEAM has now operated on ISS for 1236
over 8 years, providing the most extensive in-service data for any inflatable habitat. These 1237
deployment lessons directly inform the design of future autonomous systems: residual fold 1238
adhesion must be characterised and accounted for, deployment energy budgets must include 1239
substantial margin, and passive deployment mechanisms (sublimation, spring) may be more 1240
reliable than active pressurization for autonomous operations. 1241
6.4 Comparison with Rigid Deployable Alternatives 1242
The survey’s thesis—that inflatables offer advantages over rigid systems—requires adequate 1243
characterisation of the rigid deployable baseline. Three competing technology classes merit 1244
explicit comparison. 1245
Composite booms (e.g., CFRP bi-stable tape springs, Triangular Rollable and Col- 1246
lapsible (TRAC) booms) achieve packaging ratios exceeding 50:1 and are flight-proven at 1247
TRL 9 Murphey et al. [2015], Banik and Murphey [2010]. The TRAC boom, used on 1248
LightSail-2 and the Aeroboom Innovative Mechanism (AIM), provides high deployed stiffness 1249
with no inflation requirement. Sickinger and Herbeck Sickinger and Herbeck [2004] charac- 1250
terised CFRP boom deployment for solar sails, demonstrating that non-inflatable composite 1251
booms are the dominant competing technology for CubeSat-class deployables. 1252
Mesh reflector antennas (e.g., Harris/L3Harris AstroMesh, 12–22 m deployed diam- 1253
eter, TRL 9) achieve large deployed apertures through cable-net tensioned mesh without 1254
requiring inflation Santiago-Prowald and Rodrigues [2018]. These are the primary competi- 1255
tor to inflatable antenna concepts and represent the state of the art for deployable high-gain 1256
antennas. 1257
Mechanically hinged trusses (e.g., NASA Langley’s Compact Telescoping Array, 1258
CIRAS) provide high stiffness and precise geometry through articulated rigid elements, at 1259
the cost of higher mass and complexity compared to inflatable deployment. 1260
Table 13 presents a comparative assessment. 1261
The inflatable approach offers its greatest advantage at the largest scales (>10 m), where 1262
composite boom stiffness-to-length scaling becomes unfavourable and mesh reflector cable- 1263
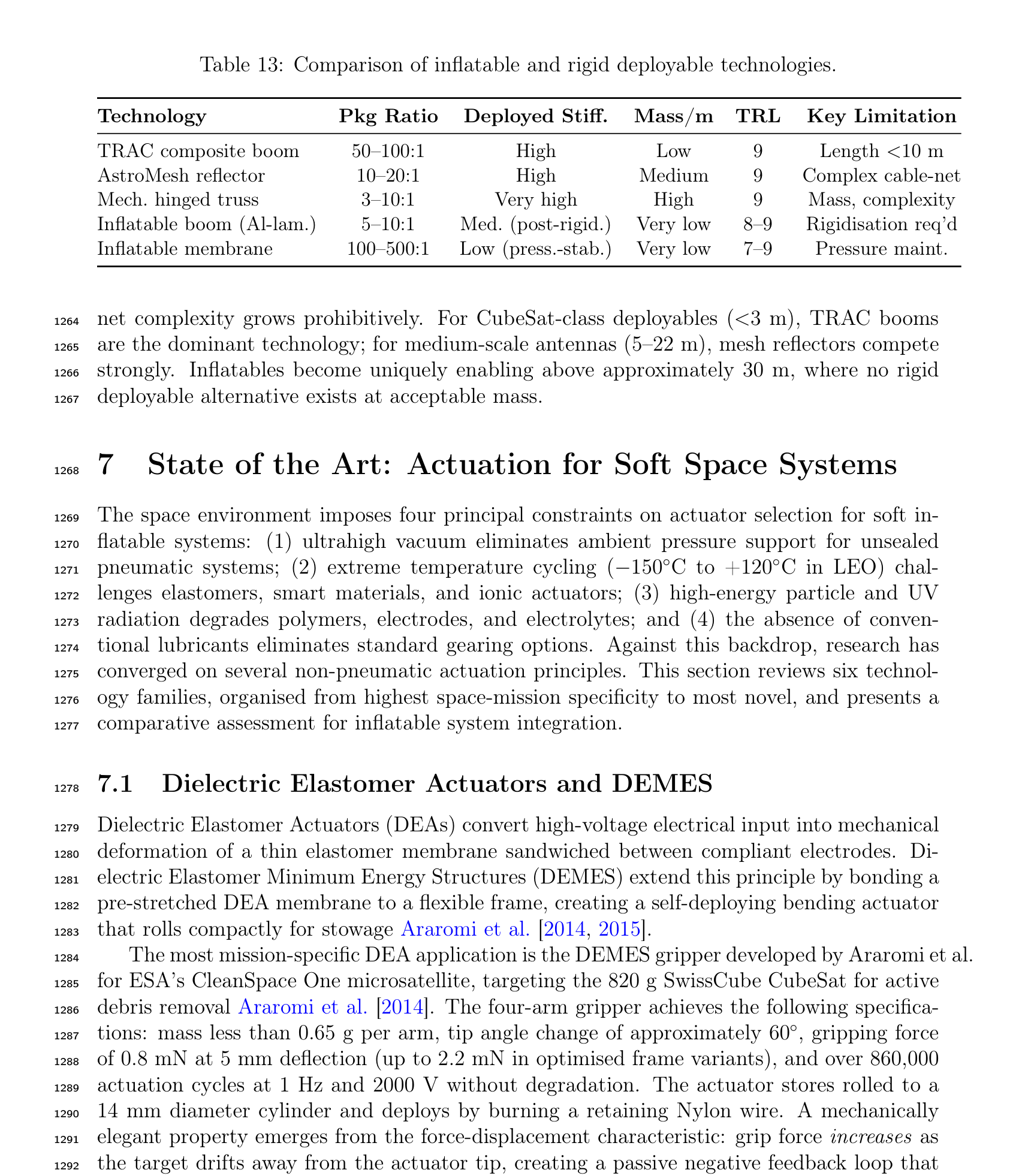
Table 13: Comparison of inflatable and rigid deployable technologies.
Technology Pkg Ratio Deployed Stiff. Mass/m TRL Key Limitation
TRAC composite boom 50–100:1 High Low 9 Length <10 m AstroMesh reflector 10–20:1 High Medium 9 Complex cable-net Mech. hinged truss 3–10:1 Very high High 9 Mass, complexity Inflatable boom (Al-lam.) 5–10:1 Med. (post-rigid.) Very low 8–9 Rigidisation req’d Inflatable membrane 100–500:1 Low (press.-stab.) Very low 7–9 Pressure maint.
net complexity grows prohibitively. For CubeSat-class deployables (<3 m), TRAC booms 1264
are the dominant technology; for medium-scale antennas (5–22 m), mesh reflectors compete 1265
strongly. Inflatables become uniquely enabling above approximately 30 m, where no rigid 1266
deployable alternative exists at acceptable mass. 1267
7 State of the Art: Actuation for Soft Space Systems 1268
The space environment imposes four principal constraints on actuator selection for soft in- 1269
flatable systems: (1) ultrahigh vacuum eliminates ambient pressure support for unsealed 1270
pneumatic systems; (2) extreme temperature cycling (−150◦C to +120◦C in LEO) chal- 1271
lenges elastomers, smart materials, and ionic actuators; (3) high-energy particle and UV 1272
radiation degrades polymers, electrodes, and electrolytes; and (4) the absence of conven- 1273
tional lubricants eliminates standard gearing options. Against this backdrop, research has 1274
converged on several non-pneumatic actuation principles. This section reviews six technol- 1275
ogy families, organised from highest space-mission specificity to most novel, and presents a 1276
comparative assessment for inflatable system integration. 1277
7.1 Dielectric Elastomer Actuators and DEMES 1278
Dielectric Elastomer Actuators (DEAs) convert high-voltage electrical input into mechanical 1279
deformation of a thin elastomer membrane sandwiched between compliant electrodes. Di- 1280
electric Elastomer Minimum Energy Structures (DEMES) extend this principle by bonding a 1281
pre-stretched DEA membrane to a flexible frame, creating a self-deploying bending actuator 1282
that rolls compactly for stowage Araromi et al. [2014, 2015]. 1283
The most mission-specific DEA application is the DEMES gripper developed by Araromi et al. 1284
for ESA’s CleanSpace One microsatellite, targeting the 820 g SwissCube CubeSat for active 1285
debris removal Araromi et al. [2014]. The four-arm gripper achieves the following specifica- 1286
tions: mass less than 0.65 g per arm, tip angle change of approximately 60◦, gripping force 1287
of 0.8 mN at 5 mm deflection (up to 2.2 mN in optimised frame variants), and over 860,000 1288
actuation cycles at 1 Hz and 2000 V without degradation. The actuator stores rolled to a 1289
14 mm diameter cylinder and deploys by burning a retaining Nylon wire. A mechanically 1290
elegant property emerges from the force-displacement characteristic: grip force increases as 1291
the target drifts away from the actuator tip, creating a passive negative feedback loop that 1292
enhances capture stability without active control Araromi et al. [2014]. 1293
Li et al. subsequently extended the 2D DEMES concept to a three-dimensional configura- 1294
tion specifically designed for on-orbit servicing, enabling triaxial manipulation of irregularly 1295
shaped targets Liang et al. [2023]. The 3D configuration achieves higher load capacity and 1296
more favorable specific force output than planar DEMES. 1297
The critical limitation of DEA/DEMES for space applications is force output: the sub- 1298
millinewton to millinewton range, while sufficient for microgravity contact-only operations 1299
on CubeSat-class targets, is inadequate for structural loads or capture of debris exceeding 1300
a few kilograms. DEA membranes (PDMS, acrylic) are also vulnerable to outgassing in 1301
vacuum and UV degradation, though neither has been systematically quantified under space 1302
conditions—a notable gap. 1303
7.2 Vacuum-Gap Electrostatic Actuators: Vacuum as Enabler 1304
A paradigm-shifting development emerged in 2025 with Sîrbu et al.’s introduction of vacuum- 1305
gap electrostatic multilayer actuators Sîrbu et al. [2025]. These devices use thin-film polymer 1306
multilayer structures enclosing vacuum gaps that zip closed upon electrical activation—a 1307
mechanism that fundamentally benefits from, rather than suffers from, the space vacuum. 1308
In terrestrial operation, the vacuum gaps must be maintained against atmospheric pressure; 1309
in space, the ambient ultrahigh vacuum (∼10−7 Pa in LEO) is the default state. 1310
The performance specifications represent a qualitative advance over existing soft actuator 1311
technologies: actuators weighing 0.7 g deliver forces exceeding 4 N, operate at bandwidths 1312
above 100 Hz, and achieve specific power of 1.4 kW/kg Sîrbu et al. [2025]. For comparison, 1313
DEMES achieves 0.8–2.2 mN force at comparable mass—vacuum-gap actuators thus exceed 1314
DEA performance by three orders of magnitude in force at the same mass scale. The gearless, 1315
lubricant-free construction eliminates two major space reliability concerns. 1316
The thin-film polymer construction of vacuum-gap actuators is structurally analogous 1317
to the multilayer membrane systems already used in inflatable habitat construction. The 1318
possibility of laminating vacuum-gap actuator layers to the inner liner of an inflatable robotic 1319
arm, combined with fibre optic shape sensors woven into the restraint webbing, suggests 1320
a pathway toward fully sensorized, actively controlled inflatable manipulators—a system 1321
architecture not yet demonstrated in the literature. The primary unresolved qualification 1322
gaps are thermal cycling (−150◦C to +120◦C), radiation tolerance, and scale-up beyond the 1323
current laboratory-scale prototypes. 1324
7.3 Ionic Electroactive Polymers: Space Tolerance Assessment 1325
Ionic electroactive polymer (IEAP) actuators operate through ion migration within a polymer 1326
membrane, producing bending deformation at low voltages (1–5 V). Punning et al. conducted 1327
the only systematic, large-sample space environment tolerance study for this actuator class, 1328
testing 320 samples across 7 IEAP material types under six space-relevant conditions: X-ray 1329
irradiation (167.4 Gy), gamma irradiation (2036 Gy from 60Co), UV exposure (180 hours, 1330
xenon lamp), vacuum (<1 mbar, 2 weeks), and cryogenic storage at 77 K (liquid N2, 2 weeks) 1331
and 4.22 K (liquid He) Punning et al. [2014]. 1332
The results establish three design rules for space IEAP deployment: 1333
(a) Terrestrial operation
(b) Space operation
Atmospheric pressure opposes vacuum gap
Ambient vacuum provides functional gap
Electrode (+)
Electrode (+)
Fe
Fe
Vacuum gap
Vacuum gap
(pumped)
(ambient)
V
V
Flexible membrane
Flexible membrane
Electrode (−)
Electrode (−)
Ambient vacuum = functional gap
Atmospheric pressure
must be overcome
No pump required
1 atm
∼0 Pa (vacuum)
Sirbu et al. 2025: 0.7 g, >4 N force, >100 Hz bandwidth, specific power 614 W/kg
Figure 7: Vacuum-gap electrostatic actuator operating principle (after Sirbu et al. 2025 Sîrbu et al. [2025]). (a) In terrestrial operation, vacuum gaps between electrodes must be main- tained against atmospheric pressure, requiring a vacuum pump. (b) In space, the ambient vacuum provides the functional dielectric gap directly, eliminating the pump and enabling higher bandwidth (>100 Hz) at extremely low mass (0.7 g, >4 N, specific power 614 W/kg).
1. Use ionic liquid electrolytes: IEAP types employing ionic liquid (IL) electrolytes 1334
(EMIBF4, EMITF, EMITFSI) showed no notable degradation under vacuum or cryo- 1335
genic conditions. Aqueous IPMC actuators (Type A) dry out in vacuum, requiring 1336
encapsulation for space use. 1337
2. Provide UV shielding for external applications: UV irradiation destroys PE- 1338
DOT and PEO-based IEAP materials via photo-oxidation. This is the primary space 1339
environment threat. Materials using carbonaceous or conducting polymer electrodes 1340
with ionic liquid electrolytes (Types B, C, G) survived UV testing with no notable 1341
effect. 1342
3. Plan for cryogenic dormancy: All tested IEAP types survived cryogenic stor- 1343
age (77 K for 2 weeks, 4.22 K for 15 minutes) and recovered full functionality upon 1344
warming—the materials cannot operate while frozen but survive and revive Punning 1345
et al. [2014]. 1346
A counter-intuitive finding is that X-ray radiation initially increases IEAP performance 1347
through radiation-induced doping of conducting polymer electrodes, an effect that normalizes 1348
within a few actuation cycles Punning et al. [2014]. The force output of current IEAPs 1349
remains in the low-millinewton range, limiting applications to sensing-adjacent tasks and 1350
micro-manipulation. 1351
7.4 Tendon-Driven Continuum Manipulators 1352
Tendon-driven continuum manipulators represent the highest-force soft actuation approach 1353
compatible with space constraints. NASA’s Tendril robot (Mehling et al., 2006) established 1354
the heritage origin: a 1:1000 aspect-ratio inspection robot designed for confined-space inspec- 1355
tion inside the Space Shuttle external tank Mehling et al. [2006]. The Tendril architecture— 1356
multiple antagonistic tendons routed along a compliant backbone—provides both the force 1357
density and bandwidth necessary for structural manipulation tasks. 1358
Ouyang et al. proposed a hybrid rigid-continuum dual-arm space robot combining a rigid 1359
primary arm for strength and reach with a continuum secondary arm for dexterity and com- 1360
pliance Ouyang et al. [2021]. The Generalized Jacobian Matrix analysis demonstrated coor- 1361
dinated motion planning for free-floating operations, establishing the mathematical frame- 1362
work for hybrid architectures where inflatable continuum arms complement rigid primary 1363
manipulators. 1364
For space-compatible tendon routing, MoS2 solid lubricant enables vacuum-compatible 1365
sliding contacts, addressing the lubrication challenge that would otherwise limit tendon- 1366
driven systems to short operational lifetimes Ruiz Vincuería et al. [2024]. The primary 1367
limitation of tendon-driven approaches is that routing tendons over long lengths (>1 m) 1368
introduces increasing friction and hysteresis, requiring careful mechanical design. 1369
7.5 Shape Memory Alloys for Deployment 1370
Shape memory alloys (SMAs), principally NiTi (Nitinol), have the highest flight TRL (8– 1371
9) among actuator technologies applicable to soft inflatable systems, though primarily for 1372
one-shot deployment rather than cyclic actuation. Nitinol achieves up to 10% recoverable 1373
strain and cycle life up to 600,000 activation cycles under controlled conditions Costanza and 1374
Tata [2020]. Space heritage includes Mars Pathfinder deployment hinges, numerous CubeSat 1375
solar array release mechanisms, and ESA satellite solar array root hinges Costanza and Tata 1376
[2020], Blanc et al. [2013]. 1377
For inflatable structures specifically, the critical limitation of SMA is its slow cooling 1378
rate in the vacuum thermal environment. Without convective cooling, SMA actuators rely 1379
on radiative heat transfer alone, limiting cyclic actuation frequency to well below 1 Hz for 1380
typical element sizes. This effectively restricts SMA to single-deployment or low-frequency 1381
repositioning applications in space. 1382
An emerging application combines SMA with inflatable structures: Patel et al. developed 1383
an analytical framework for SMA-based rigidisation of inflatable toroidal structures, where 1384
NiTi wires embedded in the inflatable wall contract upon heating to lock the deployed 1385
geometry Patel et al. [2024]. This represents a potential fourth rigidisation approach beyond 1386
the three families established by Cadogan and Scarborough Cadogan and Scarborough [2001], 1387
though it remains at the analytical stage (TRL 2–3). 1388
7.6 Jamming in Vacuum: A Novel Opportunity 1389
Variable stiffness by granular or layer jamming presents a counter-intuitive advantage in 1390
the space environment that has not been previously identified in the literature. In terres- 1391
trial soft robotics, jamming requires a dedicated vacuum pump to evacuate the jammed 1392
medium’s enclosure, with external atmospheric pressure (∼101 kPa) providing the confining 1393
force Fitzgerald et al. [2020]. Zhang et al. noted that jamming structures are “more likely 1394
to be used in soft space robots because of scalability, easy fabrication, and low cost” Zhang 1395
et al. [2023d], but did not explore the vacuum-specific advantage. 1396
In the space environment, this constraint inverts: the ambient vacuum of LEO (∼10−7 Pa) 1397
serves as the external confining medium, while an inflatable structure’s internal pressuriza- 1398
tion (∼100 kPa) provides the pressure differential across the membrane wall. A sealed jam- 1399
ming structure integrated into or attached to a pressurised inflatable therefore achieves stiff- 1400
ness modulation without any vacuum pump—a simplification unavailable on Earth. Layer 1401
jamming, which achieves stiffness ratios exceeding 25:1 in terrestrial systems Fitzgerald et al. 1402
[2020], could be particularly well-suited for variable-stiffness robotic elements embedded in 1403
inflatable arms. 1404
(a) Terrestrial jamming
(b) Space jamming
Requires vacuum pump
Ambient vacuum = confining pressure
Pvacuum ≈ 0 Pa
Patm = 101.3 kPa
(external confining pressure)
(ambient space vacuum)
Granular
Granular
medium (particles)
medium (particles)
No pump
Vacuum
Inflatable structure
needed
pump
(internal pressure)
1 atm
∼0 Pa
Evacuates interior
Stiffness transition: compliant (unjammed) to rigid (jammed) via pressure differential
Figure 8: Jamming-in-vacuum principle for variable stiffness in space. (a) Terrestrial config- uration: a vacuum pump evacuates the sealed granular membrane, and atmospheric pressure (∼101 kPa) provides the external confining force that locks the particles. (b) Space configu- ration: the ambient space vacuum provides external confining pressure directly; the internal pressurisation of the host inflatable structure provides the pressure differential. The vacuum pump is eliminated, and the stiffness transition from compliant to rigid is achieved passively.
The primary engineering challenges are: (1) selecting space-compatible granular media 1405
that do not outgas (candidates include hollow glass microspheres and sintered ceramic gran- 1406
ules); (2) maintaining gas-tight seals over mission duration against micrometeoroid puncture; 1407
and (3) characterising friction behaviour of jammed interfaces in vacuum, where the absence 1408
of adsorbed water layers may alter surface friction coefficients. This insight represents a logi- 1409
cal deduction from known physics and inflatable structure operating principles, and requires 1410
experimental validation—a 5-year research priority identified in Section 13.3. 1411
7.7 Sealed Pneumatic Actuation in Space 1412
The opening constraint of this section—that ultrahigh vacuum eliminates ambient pressure 1413
support for unsealed pneumatic systems—does not preclude sealed pneumatic actuators that 1414
carry their own gas supply. BEAM itself is the supreme example of a sealed pneumatic 1415
structure in space. Ataka et al. Ataka et al. [2020] demonstrated model-based pose control 1416
of a pneumatic eversion robot with variable stiffness that is directly relevant to inflatable 1417
continuum manipulators for space inspection tasks. Eversion robots, which navigate their 1418
environment through growth by turning inside-out Hawkes et al. [2017], are particularly 1419
promising for space applications because the growth mechanism inherently manages the gas 1420
supply within the extending structure. 1421
Sealed pneumatic actuation with onboard gas storage is viable for missions where the total 1422
number of actuation cycles is bounded (limiting gas consumption) or where the inflatable 1423
structure’s own pressurisation system can serve as the gas source. The mass penalty of gas 1424
storage—approximately 0.5–2 kg per litre at 200 bar, depending on tank technology—makes 1425
this approach less competitive for sustained cyclic actuation than electrical alternatives, but 1426
appropriate for deployment and one-shot or low-cycle capture operations. 1427
7.8 Electroadhesion and Magnetic Actuation: Emerging Approaches 1428
Two additional actuation families, while not yet proposed for space inflatable systems, merit 1429
assessment for completeness. 1430
Electroadhesion (electrostatic adhesion to a target surface) differs from the vacuum-gap 1431
actuators of Section 7.2 in operating principle: Coulombic attraction to an external target 1432
surface rather than internal gap zipping. Guo et al. Guo et al. [2020] demonstrated elec- 1433
troadhesion pads integrated with soft robotic grippers for manipulation of non-cooperative 1434
surfaces, achieving adhesion pressures of 1–5 kPa on conductive substrates. For debris cap- 1435
ture on metallic spacecraft surfaces, electroadhesion offers a contactless-force alternative to 1436
mechanical grasping. The primary space qualification gaps are dielectric breakdown in par- 1437
tial vacuum (outgassing-induced), surface contamination from space debris, and radiation 1438
degradation of the dielectric layer. 1439
Magnetic soft actuators with programmed 3D magnetisation profiles Kim et al. [2018] 1440
represent a fundamentally different approach that avoids the vacuum and temperature limi- 1441
tations of pneumatics and elastomers. While not yet proposed for space, magnetic actuation 1442
in the field-free environment of orbit would require onboard field sources (permanent magnets 1443

or electromagnets), adding mass but eliminating the outgassing and embrittlement concerns 1444
of polymer-based actuators. This approach remains at TRL 2 for space applications. 1445
Table 14 presents a comparative assessment of the nine actuation technologies assessed 1446
for inflatable space systems. 1447
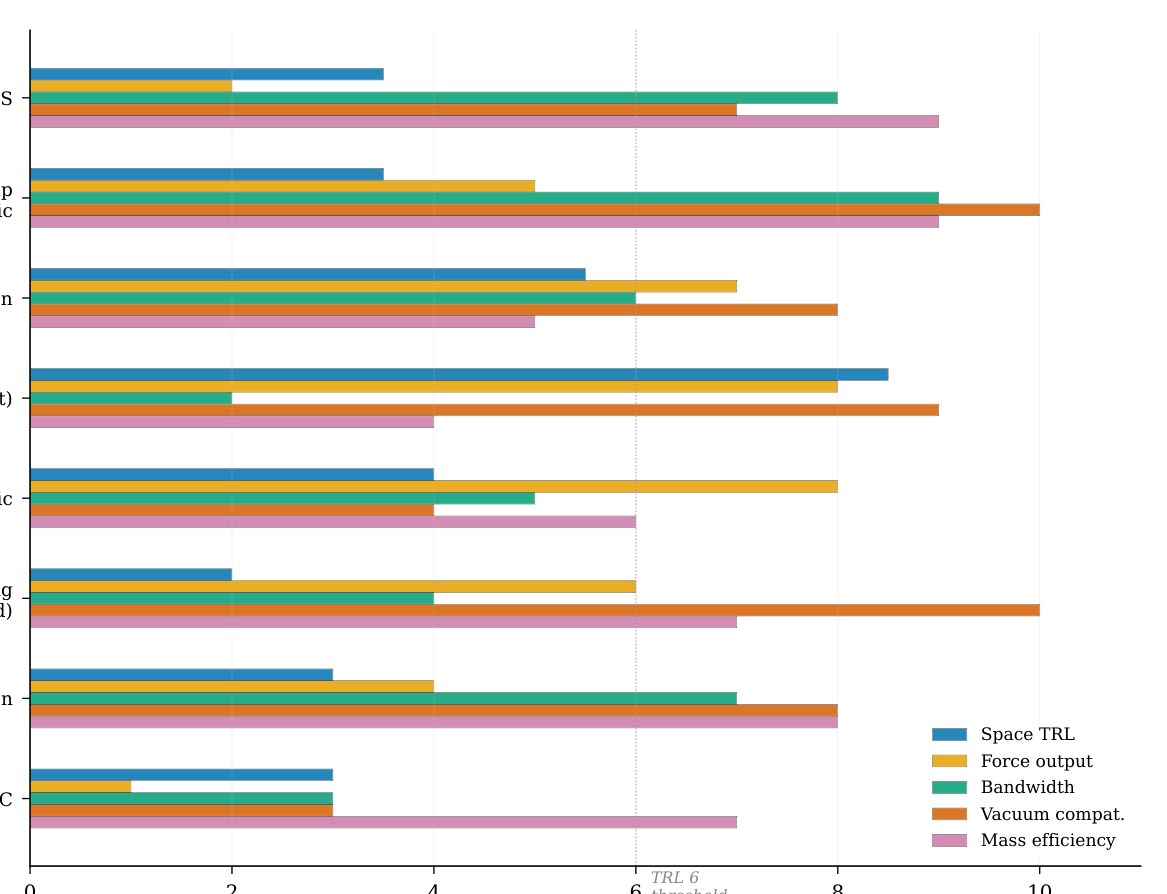
DEA / DEMES
Vacuum-gap electrostatic
Tendon-driven
SMA (deployment)
Sealed pneumatic
Jamming (vacuum-enabled)
Electroadhesion
Space TRL
Force output
Bandwidth
IEAP / IPMC
Vacuum compat.
Mass efficiency
TRL 6 threshold
0 2 4 6 8 10 Rating (0 = lowest, 10 = highest)
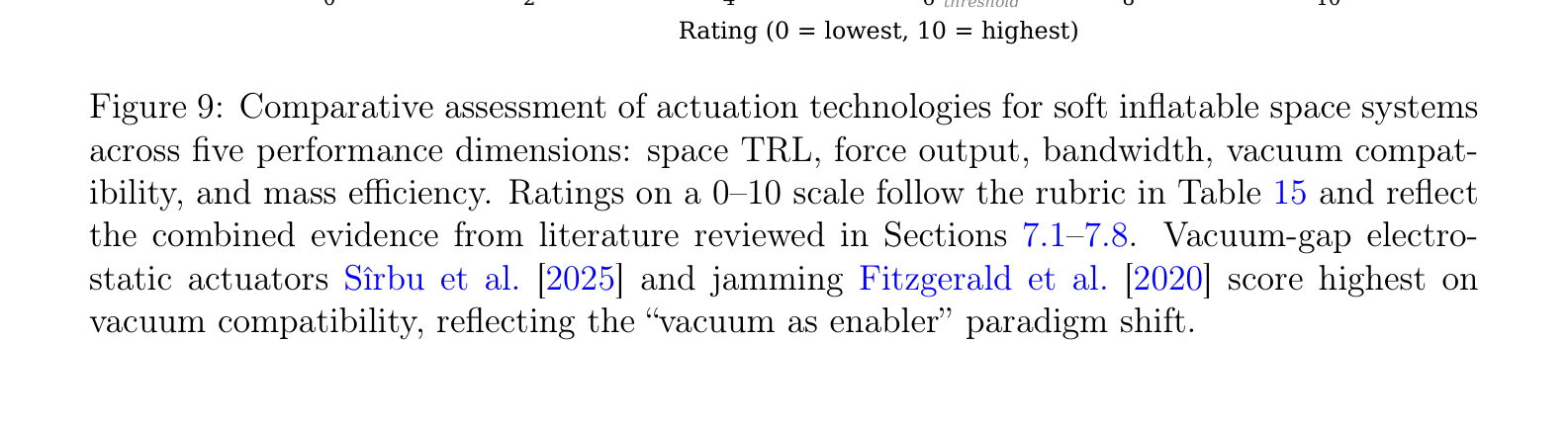
Figure 9: Comparative assessment of actuation technologies for soft inflatable space systems across five performance dimensions: space TRL, force output, bandwidth, vacuum compat- ibility, and mass efficiency. Ratings on a 0–10 scale follow the rubric in Table 15 and reflect the combined evidence from literature reviewed in Sections 7.1–7.8. Vacuum-gap electro- static actuators Sîrbu et al. [2025] and jamming Fitzgerald et al. [2020] score highest on vacuum compatibility, reflecting the “vacuum as enabler” paradigm shift.
Table 14: Actuator technology comparison for soft inflatable space systems.
Technology Force Speed Mass TRL Critical Space Gap (Space)
DEA/DEMES 0.8–2.2 mN ∼1 Hz <0.65 g 3–4 UV, outgas., low force Vacuum-gap electrost. >4 N >100 Hz 0.7 g 3–4 Radiation, thermal IL-IEAP (types B,C) Very low Medium Excellent 3–4 UV (shield), frozen op. Tendon-driven High High Good 5–6 Long-path friction SMA (one-shot) Medium Slow Low 8–9 Slow cooling, fatigue Jamming (layer) Stiffness only Medium Good 2–3 Unvalidated in vacuum Sealed pneumatic High Medium Mod. (gas) 4–5 Gas supply mass Electroadhesion 1–5 kPa Fast Low 2–3 Surface contam., diel. brkdn Magnetic (programmed) Medium Fast Mod. (magnet) 1–2 Requires onboard field
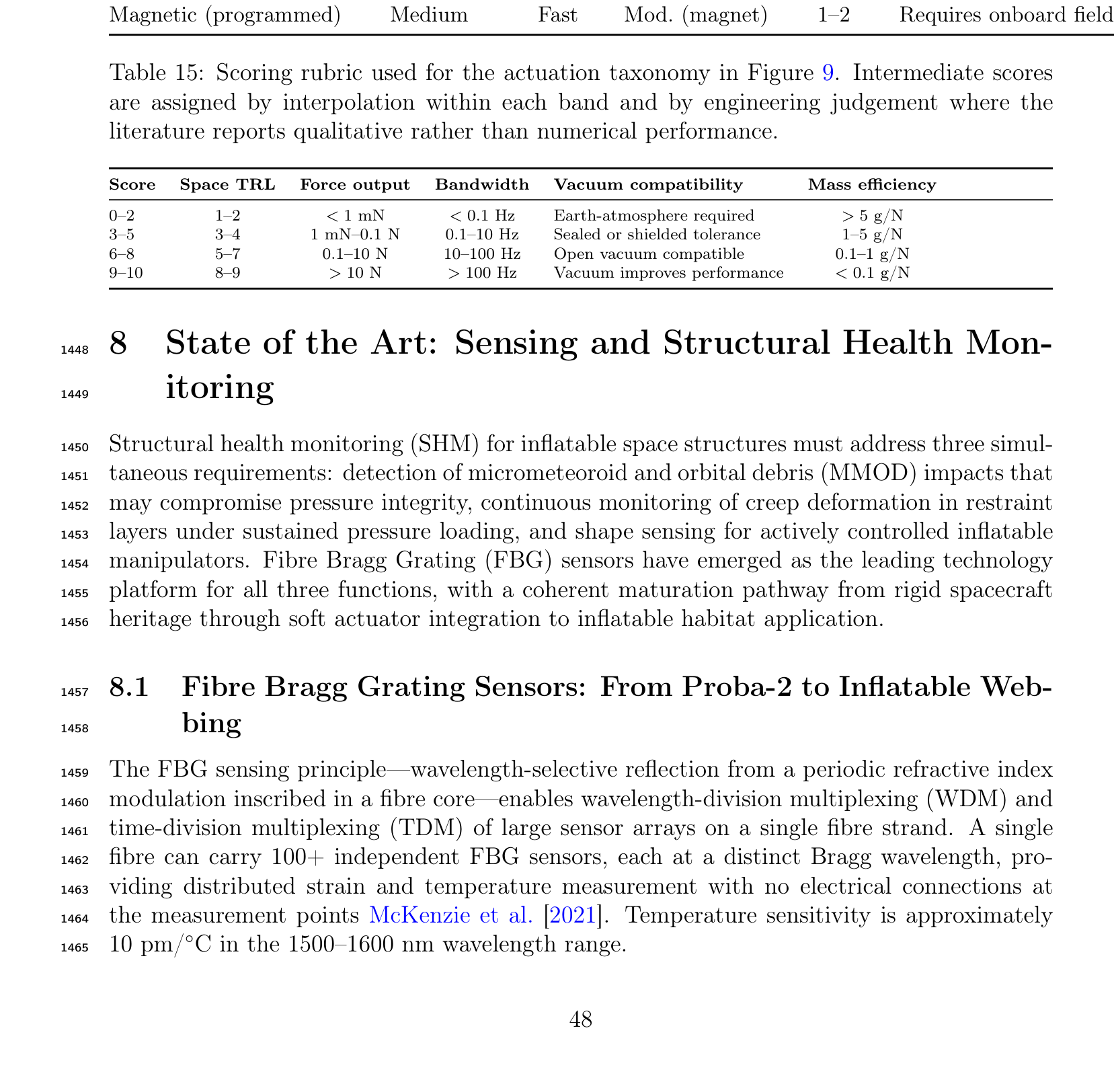
Table 15: Scoring rubric used for the actuation taxonomy in Figure 9. Intermediate scores are assigned by interpolation within each band and by engineering judgement where the literature reports qualitative rather than numerical performance.
Score Space TRL Force output Bandwidth Vacuum compatibility Mass efficiency
0–2 1–2 < 1 mN < 0.1 Hz Earth-atmosphere required > 5 g/N 3–5 3–4 1 mN–0.1 N 0.1–10 Hz Sealed or shielded tolerance 1–5 g/N 6–8 5–7 0.1–10 N 10–100 Hz Open vacuum compatible 0.1–1 g/N 9–10 8–9 > 10 N > 100 Hz Vacuum improves performance < 0.1 g/N
8 State of the Art: Sensing and Structural Health Mon- 1448
itoring 1449
Structural health monitoring (SHM) for inflatable space structures must address three simul- 1450
taneous requirements: detection of micrometeoroid and orbital debris (MMOD) impacts that 1451
may compromise pressure integrity, continuous monitoring of creep deformation in restraint 1452
layers under sustained pressure loading, and shape sensing for actively controlled inflatable 1453
manipulators. Fibre Bragg Grating (FBG) sensors have emerged as the leading technology 1454
platform for all three functions, with a coherent maturation pathway from rigid spacecraft 1455
heritage through soft actuator integration to inflatable habitat application. 1456
8.1 Fibre Bragg Grating Sensors: From Proba-2 to Inflatable Web- 1457
bing 1458
The FBG sensing principle—wavelength-selective reflection from a periodic refractive index 1459
modulation inscribed in a fibre core—enables wavelength-division multiplexing (WDM) and 1460
time-division multiplexing (TDM) of large sensor arrays on a single fibre strand. A single 1461
fibre can carry 100+ independent FBG sensors, each at a distinct Bragg wavelength, pro- 1462
viding distributed strain and temperature measurement with no electrical connections at 1463
the measurement points McKenzie et al. [2021]. Temperature sensitivity is approximately 1464
10 pm/◦C in the 1500–1600 nm wavelength range. 1465
ESA’s 20+ year investment in fibre optic sensing for spacecraft culminated in the Fiber 1466
Sensor Demonstrator (FSD) aboard Proba-2, launched in November 2009—the first fibre 1467
optic sensor network demonstrated in the space environment McKenzie et al. [2021]. The 1468
FSD incorporated 12 temperature sensors, a high-temperature thruster sensor, and a xenon 1469
tank pressure sensor, establishing TRL 7–8 for FBG technology on rigid spacecraft platforms. 1470
Radiation tolerance of appropriately selected fibre types (nitrogen-doped, fluorine-doped) has 1471
been confirmed through ground testing, with Type II and Type III FBGs showing the highest 1472
radiation hardness Morana et al. [2022], Baba et al. [2025]. 1473
The critical transition from rigid spacecraft to inflatable structures was demonstrated by 1474
Bally Ribbon Mills (BRM) and Luna Innovations under a NASA SBIR program Bally Ribbon 1475
Mills and Luna Innovations [2020]. High-Definition Fibre Optic Sensing (HD-FOS) elements 1476
were woven directly into Vectran structural restraint webbing during the manufacturing 1477
process—not bonded after fabrication. Testing on 0.61 m and 2.74 m (1/3-scale) inflatable 1478
habitat test articles at NASA Johnson Space Center demonstrated detection of: 1479
• Creep deformation under sustained pressure loading 1480
• Internal pressure changes during inflation and operational cycling 1481
• Micrometeoroid impact events (confirmed via hypervelocity impact testing on inflated 1482
articles) 1483
The partnership included NASA, Sierra Nevada Corporation, ILC Dover, BRM, and Luna 1484
Innovations, targeting applications for the Lunar Gateway and Mars transit habitats Bally 1485
Ribbon Mills and Luna Innovations [2020]. However, these results have been reported only 1486
in technical briefs and SBIR documentation, not in peer-reviewed publications—a gap that 1487
limits independent assessment of sensitivity metrics, minimum detectable impact size, and 1488
long-term reliability. 1489
The TRL assessment for FBG sensing across application domains is: 1490
• FBG on rigid spacecraft: TRL 7–8 (Proba-2 FSD flight heritage, 2009) 1491
• FBG in Vectran restraint webbing: TRL 4–5 (NASA JSC ground testing, 0.61 m and 1492
2.74 m articles) 1493
• FBG in operational inflatable habitat (flight): TRL 2–3 (not yet demonstrated) 1494
8.2 Multicore Fibre Optic Shape Sensing 1495
For soft actuator shape sensing, Galloway et al. demonstrated the first integration of a 1496
monolithic multicore Fibre Optic Shape Sensor (FOSS) into a fibre-reinforced soft pneumatic 1497
actuator Galloway et al. [2019]. The multicore fibre contains multiple sensing cores within a 1498
single cladding, enabling three-dimensional shape reconstruction from differential curvature 1499
measurements without requiring multiple separate fibre installations. Key results include a 1500
mean tip position error of 0.64 mm, successful reconstruction of six distinct planar shape 1501
profiles, and simultaneous detection of collision events, environmental shape changes, and 1502
material stiffness variations within a single sensing modality. 1503
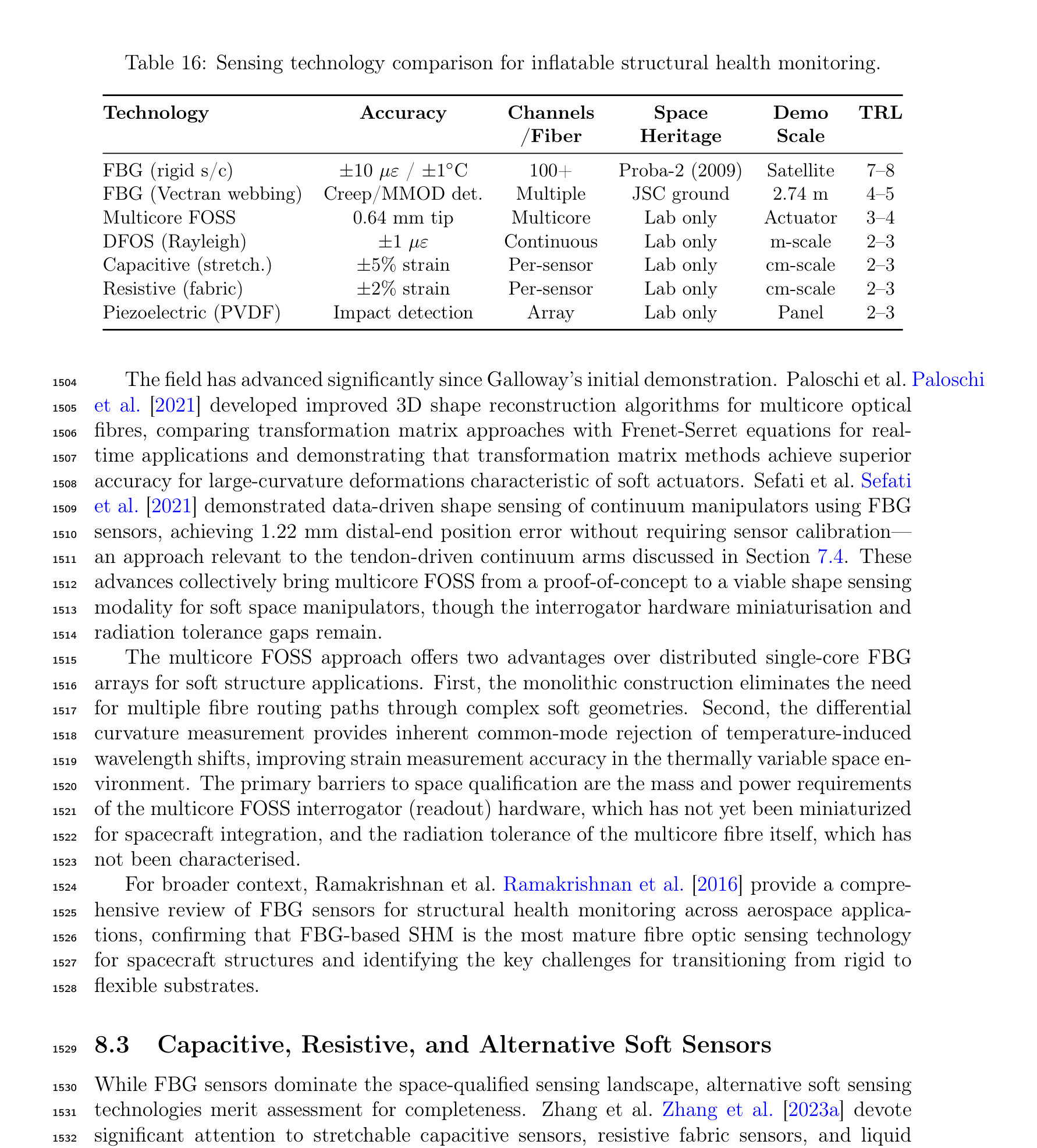
Table 16: Sensing technology comparison for inflatable structural health monitoring.
Technology Accuracy Channels Space Demo TRL /Fiber Heritage Scale
FBG (rigid s/c) ±10 µε / ±1◦C 100+ Proba-2 (2009) Satellite 7–8 FBG (Vectran webbing) Creep/MMOD det. Multiple JSC ground 2.74 m 4–5 Multicore FOSS 0.64 mm tip Multicore Lab only Actuator 3–4 DFOS (Rayleigh) ±1 µε Continuous Lab only m-scale 2–3 Capacitive (stretch.) ±5% strain Per-sensor Lab only cm-scale 2–3 Resistive (fabric) ±2% strain Per-sensor Lab only cm-scale 2–3 Piezoelectric (PVDF) Impact detection Array Lab only Panel 2–3
The field has advanced significantly since Galloway’s initial demonstration. Paloschi et al. Paloschi 1504
et al. [2021] developed improved 3D shape reconstruction algorithms for multicore optical 1505
fibres, comparing transformation matrix approaches with Frenet-Serret equations for real- 1506
time applications and demonstrating that transformation matrix methods achieve superior 1507
accuracy for large-curvature deformations characteristic of soft actuators. Sefati et al. Sefati 1508
et al. [2021] demonstrated data-driven shape sensing of continuum manipulators using FBG 1509
sensors, achieving 1.22 mm distal-end position error without requiring sensor calibration— 1510
an approach relevant to the tendon-driven continuum arms discussed in Section 7.4. These 1511
advances collectively bring multicore FOSS from a proof-of-concept to a viable shape sensing 1512
modality for soft space manipulators, though the interrogator hardware miniaturisation and 1513
radiation tolerance gaps remain. 1514
The multicore FOSS approach offers two advantages over distributed single-core FBG 1515
arrays for soft structure applications. First, the monolithic construction eliminates the need 1516
for multiple fibre routing paths through complex soft geometries. Second, the differential 1517
curvature measurement provides inherent common-mode rejection of temperature-induced 1518
wavelength shifts, improving strain measurement accuracy in the thermally variable space en- 1519
vironment. The primary barriers to space qualification are the mass and power requirements 1520
of the multicore FOSS interrogator (readout) hardware, which has not yet been miniaturized 1521
for spacecraft integration, and the radiation tolerance of the multicore fibre itself, which has 1522
not been characterised. 1523
For broader context, Ramakrishnan et al. Ramakrishnan et al. [2016] provide a compre- 1524
hensive review of FBG sensors for structural health monitoring across aerospace applica- 1525
tions, confirming that FBG-based SHM is the most mature fibre optic sensing technology 1526
for spacecraft structures and identifying the key challenges for transitioning from rigid to 1527
flexible substrates. 1528
8.3 Capacitive, Resistive, and Alternative Soft Sensors 1529
While FBG sensors dominate the space-qualified sensing landscape, alternative soft sensing 1530
technologies merit assessment for completeness. Zhang et al. Zhang et al. [2023a] devote 1531
significant attention to stretchable capacitive sensors, resistive fabric sensors, and liquid 1532
metal strain sensors for soft space robots. The advantages of these technologies include: no 1533
requirement for specialised interrogator hardware (unlike FBG, which requires wavelength- 1534
swept laser sources), simpler integration into soft structures via printing or embedding, and 1535
lower per-sensor cost. However, for space applications, three significant limitations arise: 1536
• Electromagnetic interference (EMI) sensitivity: Capacitive and resistive sensors 1537
operate in the electrical domain and are vulnerable to the charged particle environ- 1538
ment of LEO, solar radio bursts, and EMI from onboard electronics. FBG sensors, 1539
operating in the optical domain, are inherently immune to EMI—a decisive advantage 1540
for spacecraft. 1541
• Radiation vulnerability: Liquid metal sensors (e.g., eutectic gallium-indium, EGaIn) 1542
and conductive polymer sensors have not been characterised for radiation tolerance. 1543
Ionising radiation can alter the resistivity of conductive polymers and the wetting prop- 1544
erties of liquid metals, degrading sensor calibration over mission-duration timescales. 1545
• Multiplexing limitations: A single optical fibre can carry 100+ independent FBG 1546
sensors via wavelength-division multiplexing; achieving comparable channel density 1547
with electrical sensors requires extensive wiring harnesses that add mass and failure 1548
modes to flexible structures. 1549
For inflatable habitat applications, capacitive pressure sensors could complement FBG 1550
strain sensors by providing direct pressure measurement at locations inaccessible to fibre 1551
routing. For soft robotic manipulators, resistive bend sensors offer simplicity advantages for 1552
prototype development, though FBG remains the preferred technology for flight systems. 1553
8.4 Distributed Fibre Optic Sensing: Rayleigh and Brillouin Scat- 1554
tering 1555
Distributed fibre optic sensing (DFOS) by Rayleigh or Brillouin scattering provides contin- 1556
uous strain and temperature profiles along the entire fibre length, rather than at discrete 1557
FBG grating locations. Rayleigh-based DFOS (e.g., Luna Inc. ODiSI platform) achieves 1558
spatial resolution of approximately 0.65 mm with strain resolution better than ±1 µε, while 1559
Brillouin-based systems provide sensing over distances up to 100 km at reduced spatial res- 1560
olution (typically 0.5–1 m). For inflatable habitats with large membrane areas requiring 1561
continuous monitoring (rather than point-by-point FBG interrogation), DFOS offers the 1562
potential for comprehensive strain mapping of the entire restraint layer from a single fibre 1563
installation. 1564
The principal barriers to space deployment of DFOS are: (i) interrogator size, mass, 1565
and power (current laboratory DFOS systems exceed 10 kg and 50 W, compared to <2 kg 1566
and <10 W for space-grade FBG interrogators); (ii) sensitivity to fibre bending loss, which 1567
is exacerbated by the tight bend radii in folded inflatable structures during stowage; and 1568
(iii) the absence of any space-environment characterisation data. DFOS is assessed at TRL 2– 1569
3 for space inflatable applications, but its unique capability for continuous spatial coverage 1570
makes it a high-priority development target for large-scale habitat SHM systems. 1571
8.5 Distributed Impact Detection 1572
The Distributed Impact Detection System (DIDS) installed on BEAM represents the highest- 1573
TRL implementation of impact sensing for inflatable habitats. DIDS uses distributed sensors 1574
to detect and locate MMOD impacts on the inflatable shell, providing real-time structural 1575
integrity monitoring. 1576
Beyond the BEAM DIDS, two emerging approaches extend impact detection capabilities. 1577
The BRM/Luna FBG-in-Vectran-webbing system described in Section 8.1 detected hyperve- 1578
locity impacts during ground testing, with the woven integration providing inherent coverage 1579
of the restraint layer structural grid Bally Ribbon Mills and Luna Innovations [2020]. Sepa- 1580
rately, White et al. demonstrated on-demand fabrication of PVDF-trFE piezoelectric sensors 1581
via in-space manufacturing techniques, enabling the production of impact detection arrays 1582
directly on deployed inflatable structures White et al. [2024]. This approach could address 1583
the challenge of instrumenting structures that are too large or complex to pre-instrument 1584
before launch. 1585
Li et al. proposed a complementary SHM approach based on low-frequency vibration 1586
response characterisation of pressurised inflatable structures, where changes in modal fre- 1587
quencies indicate structural degradation Li et al. [2022b]. This global monitoring approach 1588
could complement the local sensing provided by FBG arrays, together forming a hierarchical 1589
SHM architecture: global vibration monitoring for overall structural health assessment, and 1590
local FBG sensing for precise damage location and magnitude quantification. 1591
The pathway from current demonstrated capabilities to a flight-qualified inflatable SHM 1592
system requires: (1) formal peer-reviewed publication of the BRM/Luna FBG-in-webbing 1593
results with full sensitivity characterisation; (2) space qualification of FOSS interrogator 1594
hardware (mass, power, radiation tolerance); (3) development of data fusion algorithms 1595
combining local FBG and global vibration sensing; and (4) a flight demonstration, potentially 1596
as an ISS external payload experiment, to bridge the TRL 4–5 to TRL 7–8 gap. 1597
9 State of the Art: Power Systems for Large Inflatables 1598
The integration of electrical power generation with inflatable space structures is a critical 1599
enabling challenge for large deployable platforms. Unlike rigid spacecraft, where solar ar- 1600
rays are mechanically decoupled from the primary structure, inflatable systems present the 1601
possibility—and the engineering challenge—of co-locating photovoltaic generation on the de- 1602
ployable membrane itself. This section reviews the flexible solar array landscape, the singular 1603
attempt at inflatable-power integration (PowerSphere), and energy storage considerations for 1604
mission architectures ranging from 100 m-class debris shields to inflatable habitats. 1605
9.1 Flexible Solar Array Landscape: ROSA to Perovskite 1606
The current state of the art in flexible solar arrays for space is defined by the Roll-Out Solar 1607
Array (ROSA), which achieved TRL 9 via ISS flight demonstration in June 2017 as part 1608
of the STP-H5 experiment Spence et al. [2018]. The demonstration unit (5.40 m × 1.67 m) 1609
deployed successfully using stored strain energy in carbon-fibre-reinforced polymer (CFRP) 1610
slit-tube booms, requiring no motors. The subsequent production variant, iROSA, scaled 1611
to 6 m × 13.7 m wings generating over 28 kW per wing at beginning of life with XTJ Prime 1612
triple-junction cells at 30.7% efficiency. Six iROSA wings installed on the ISS between 1613
2021 and 2023 added over 120 kW of generation capacity. At system level (blanket plus 1614
booms, excluding spacecraft attachment hardware), ROSA achieves a specific power exceed- 1615
ing 100 W/kg—approximately 3.7× the legacy ISS silicon rigid-panel arrays at ∼27 W/kg 1616
Spence et al. [2018], Yan et al. [2025]. Critically, however, ROSA’s flexible photovoltaic 1617
blanket is deployed on rigid composite booms; the deployment mechanism is structurally 1618
distinct from inflatable substrate concepts. 1619
Beyond ROSA, three deployment architectures compete for next-generation high-power 1620
arrays Yan et al. [2025]: (i) Z-fold accordion panels on a central mast, representing the 1621
ISS legacy approach at TRL 9; (ii) fan-fold blankets on deployable masts, exemplified by 1622
China’s CST arrays on the Wentian laboratory module (2022), achieving approximately 4× 1623
the specific power of rigid baselines; and (iii) roll-out arrays (ROSA/iROSA class). Mega- 1624
ROSA and SOLAROSA concepts target 200–500 W/kg for systems exceeding 100 kW, though 1625
these remain at TRL 4–5 Yan et al. [2025]. For very large arrays approaching the kilometre 1626
scale (Space Solar Power Station concepts), wireless power transmission between modules 1627
has been identified as a necessity Yan et al. [2025]. 1628
A paradigm shift in flexible photovoltaic technology is emerging from perovskite-based 1629
tandem cells. Lang et al. Lang et al. [2020] provided the critical finding that perovskite/CIGS 1630
(copper indium gallium selenide) tandem cells are radiation-hard, while perovskite/silicon 1631
heterojunction (SHJ) tandems are emphatically not. Under 68 MeV proton irradiation at a 1632
fluence of 2 × 1012 p+/cm2 (equivalent to over 50 years at ISS altitude), perovskite/CIGS 1633
tandems retained approximately 85% of initial power conversion efficiency, whereas per- 1634
ovskite/SHJ devices degraded catastrophically to ∼1% retention due to proton-induced deep 1635
trap states in the silicon bottom cell Lang et al. [2020]. The perovskite top cell itself was 1636
essentially unaffected, with quasi-Fermi level splitting changing by only 0.004 eV. With ac- 1637
tive layers only 4.38 µm thick (2.8 mg/cm2), perovskite/CIGS achieves a specific power of 1638
7,400 W/kg at the active-layer level, or 2,100 W/kg when including a 25µm flexible polyimide 1639
substrate Lang et al. [2020]. More recently, Jeong et al. Jeong et al. [2024] demonstrated 1640
23.64% efficient flexible perovskite/CIGS tandems surviving 100,000 bending cycles with a 1641
specific power of approximately 6,150 W/kg at the cell level. 1642
These figures represent a 10–60× improvement over ROSA’s system-level specific power, 1643
though the comparison requires careful attention to system boundaries: cell-only figures 1644
exclude interconnects, encapsulant, wiring harness, and structural substrate, which collec- 1645
tively reduce specific power by a factor of 3–6× at the system level. Table 17 summarises 1646
the specific power versus TRL landscape across flexible photovoltaic technologies. 1647
9.2 The Inflatable-Power Integration Gap: PowerSphere and Be- 1648
yond 1649
The most direct attempt to integrate thin-film photovoltaics with an inflatable deployable 1650
structure was NASA’s PowerSphere programme (2004–2009), led by ILC Dover (structure), 1651
NASA Glenn Research Center (cells), and Sandia National Laboratories (interconnects) 1652
Cadogan et al. [2006b], Simburger et al. [2005]. The PowerSphere Engineering Develop- 1653
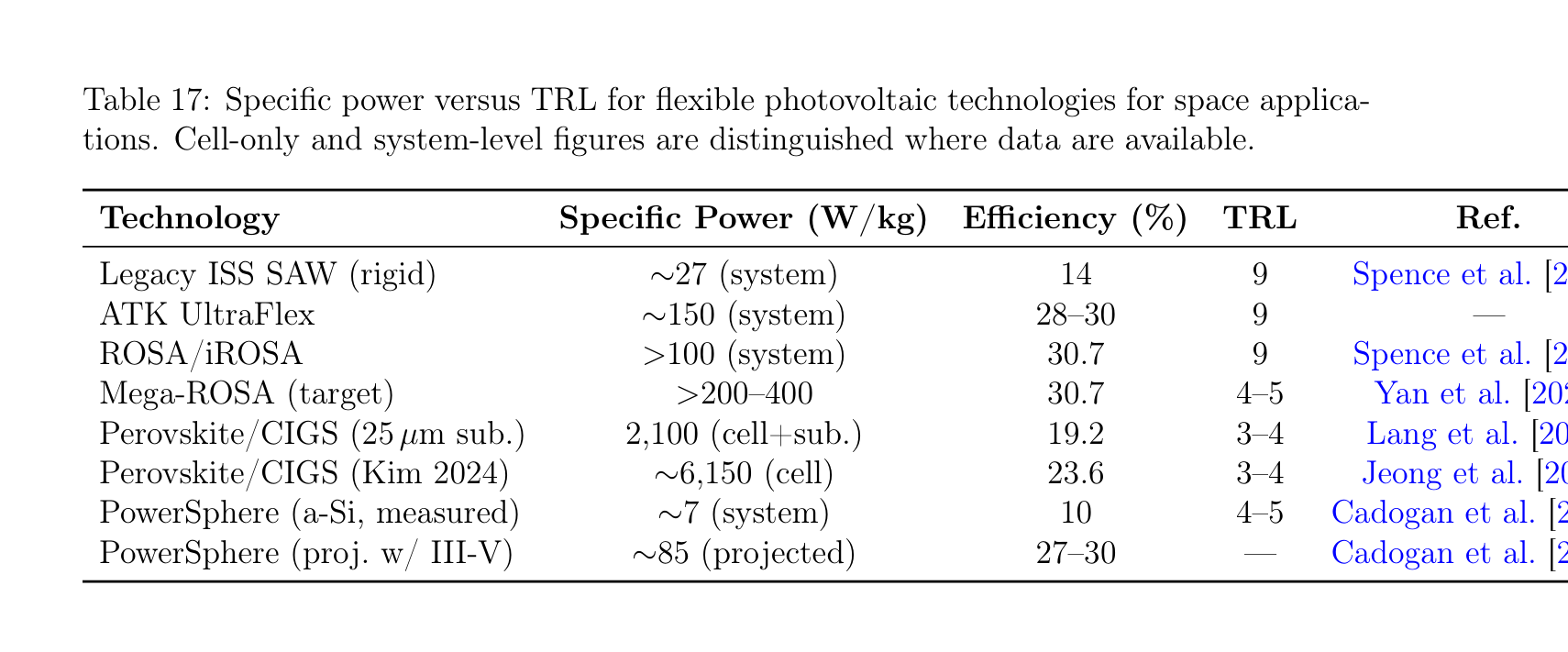
Table 17: Specific power versus TRL for flexible photovoltaic technologies for space applica- tions. Cell-only and system-level figures are distinguished where data are available.
Technology Specific Power (W/kg) Efficiency (%) TRL Ref.
Legacy ISS SAW (rigid) ∼27 (system) 14 9 Spence et al. [2 ATK UltraFlex ∼150 (system) 28–30 9 — ROSA/iROSA >100 (system) 30.7 9 Spence et al. [2 Mega-ROSA (target) >200–400 30.7 4–5 Yan et al. [202 Perovskite/CIGS (25 µm sub.) 2,100 (cell+sub.) 19.2 3–4 Lang et al. [20 Perovskite/CIGS (Kim 2024) ∼6,150 (cell) 23.6 3–4 Jeong et al. [20 PowerSphere (a-Si, measured) ∼7 (system) 10 4–5 Cadogan et al. [2 PowerSphere (proj. w/ III-V) ∼85 (projected) 27–30 — Cadogan et al. [2
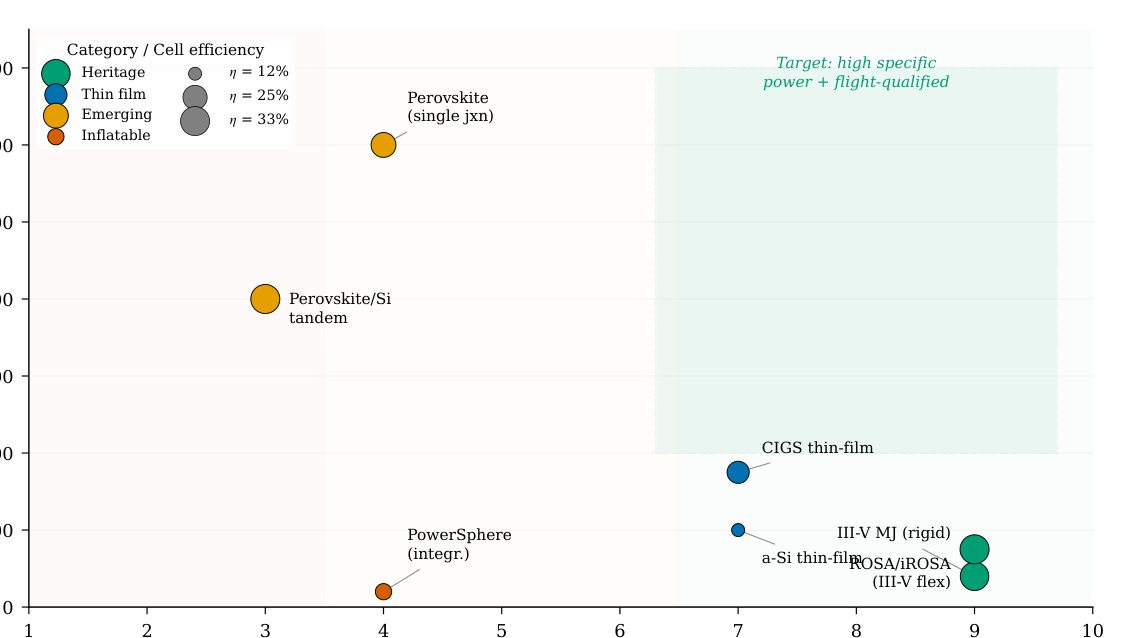
Category / Cell efficiency
Target: high specific power + flight-qualified
1400
η = 12%
Heritage Thin film Emerging Inflatable
η = 25%
Perovskite (single jxn)
η = 33%
1200
Specific power (W/kg)
1000
800
Perovskite/Si tandem
600
CIGS thin-film
400
200
III-V MJ (rigid)
PowerSphere (integr.)
a-Si thin-film
ROSA/iROSA
(III-V flex)
0
1 2 3 4 5 6 7 8 9 10 Technology Readiness Level (TRL)
Figure 10: Specific power versus technology readiness level for flexible photovoltaic technolo- gies relevant to inflatable space structures. Marker size indicates cell efficiency. Perovskite- based technologies Lang et al. [2020], Jeong et al. [2024] offer 10–60× improvements over heritage ROSA systems Spence et al. [2018] at the cell level, but remain at TRL 3–4. The green shaded region indicates the target design space for next-generation inflatable-power integration: high specific power (>400 W/kg) at flight-qualified TRL (>6).
ment Unit was a 0.6 m diameter UV-rigidisable inflatable geodetic sphere clad with thin-film 1654
amorphous silicon (a-Si) solar cells on a polyimide substrate. The complete system com- 1655
prised a 1 kg PowerSphere subsystem mounted on a 3 kg bus, with 15 cells per hemisphere (9 1656
hexagonal, 6 pentagonal) connected via copper wrap-around flex-circuit interconnects that 1657
could survive folding during stowage without cracking Cadogan et al. [2006b], Simburger 1658
et al. [2005]. 1659
The UV-rigidisation mechanism is particularly significant for the survey’s themes. Thirty 1660
hinges per sphere used S-glass fibre reinforced with ATI-P600-2 UV-curing epoxy (glass tran- 1661
sition temperature Tg = 211 ◦C), encapsulated in UV-transparent 1-mil Mylar film. Upon 1662
exposure to solar UV radiation (λ < 385 nm) for 10–45 minutes post-deployment, the resin 1663
polymerised, converting the inflatable into a self-supporting rigid structure and eliminating 1664
the requirement for long-term inflation gas retention Cadogan et al. [2006b]. Inflation was 1665
achieved passively through vapour pressure from sublimation powder at approximately 1 psi 1666
(∼6.9 kPa). 1667
Thermal cycling tests (−120 ◦C to +80 ◦C, 1000 cycles per NASA specification) demon- 1668
strated cell and interconnect survival with less than 2% power degradation, although one 1669
of four interconnect coupons failed, prompting the addition of a titanium binder layer as a 1670
design modification. Cell interconnect technology was partially validated on the MISSE-5 1671
experiment aboard the ISS Cadogan et al. [2006b]. At 10% a-Si cell efficiency, the 0.6 m 1672
prototype generated approximately 29 W at design point, yielding a system specific power 1673
of ∼7.25 W/kg. With projected III-V triple-junction cells at 27–30% efficiency, the concept 1674
was estimated to reach ∼85 W/kg. 1675
The PowerSphere programme reached TRL 4–5 but never flew. Planned missions—the 1676
PowerSphere Flight Experiment and PSIREX (Pico Satellite Inflatable Reflector Experiment)— 1677
were not implemented, and the programme appears inactive since the final publication by 1678
Curtis et al. in 2007 on thermal cycling results Curtis et al. [2007]. No successor pro- 1679
gramme integrating thin-film photovoltaics with inflatable structure deployment has been 1680
identified. This represents a critical gap: ROSA (TRL 9) demonstrates that flexible photo- 1681
voltaic blankets function reliably in space, and PowerSphere (TRL 4–5) demonstrated that 1682
cells can survive fold/deploy on an inflatable substrate, but nobody is currently pursuing 1683
inflatable-integrated photovoltaics. A revival of the PowerSphere concept using modern per- 1684
ovskite/CIGS cells—which offer 200–300× higher specific power than the original a-Si cells 1685
and validated radiation hardness Lang et al. [2020]—represents a logical and compelling 1686
research direction. 1687
9.3 Energy Storage: Li-ion, RFC, and Mission-Dependent Selection 1688
Energy storage for large inflatable structures follows established space heritage, with tech- 1689
nology selection driven primarily by eclipse duration and mission architecture. The current 1690
standard is lithium-ion, with state-of-the-art cell-level specific energy of 200–300 Wh/kg 1691
and system-level (including battery management, thermal control, and structure) of 100– 1692
160 Wh/kg Sharma and Santasalo-Aarnio [2025]. The ISS lithium-ion upgrade programme 1693
(2017–2021), replacing nickel-hydrogen (Ni-H2) with 24 lithium-ion Orbital Replacement 1694
Units (ORUs) at 4 kWh each, provides direct heritage for large-structure lithium-ion energy 1695
storage. 1696
For a 100 m-class inflatable debris shield in LEO (90-minute orbit, 36-minute eclipse), 1697
the power demand is driven by supporting subsystems rather than the passive membrane 1698
itself. Station-keeping via electric propulsion dominates at 1–50 kW depending on orbit and 1699
attitude strategy (Section 11.3); attitude control, telemetry, and sensors add 1–7 kW. A total 1700
system power demand in the range of 2–50 kW is appropriate, requiring 4–40 kWh of eclipse 1701
energy storage—translating to 25–250 kg of lithium-ion battery mass at 160 Wh/kg system 1702
level. This is a non-trivial but manageable fraction of the estimated 5,000 kg total system 1703
mass. 1704
For missions requiring extended eclipse storage—notably lunar surface operations (354- 1705
hour lunar night) or deep-space transit—regenerative fuel cells (RFCs) offer 400–1,000 Wh/kg 1706
at system level but remain at TRL 5–6 for space applications Sharma and Santasalo-Aarnio 1707

[2025]. Supercapacitors (5–15 Wh/kg) are poorly suited for eclipse energy storage but may 1708
serve pulsed-load applications such as electric propulsion ignition or deployment actuators. 1709
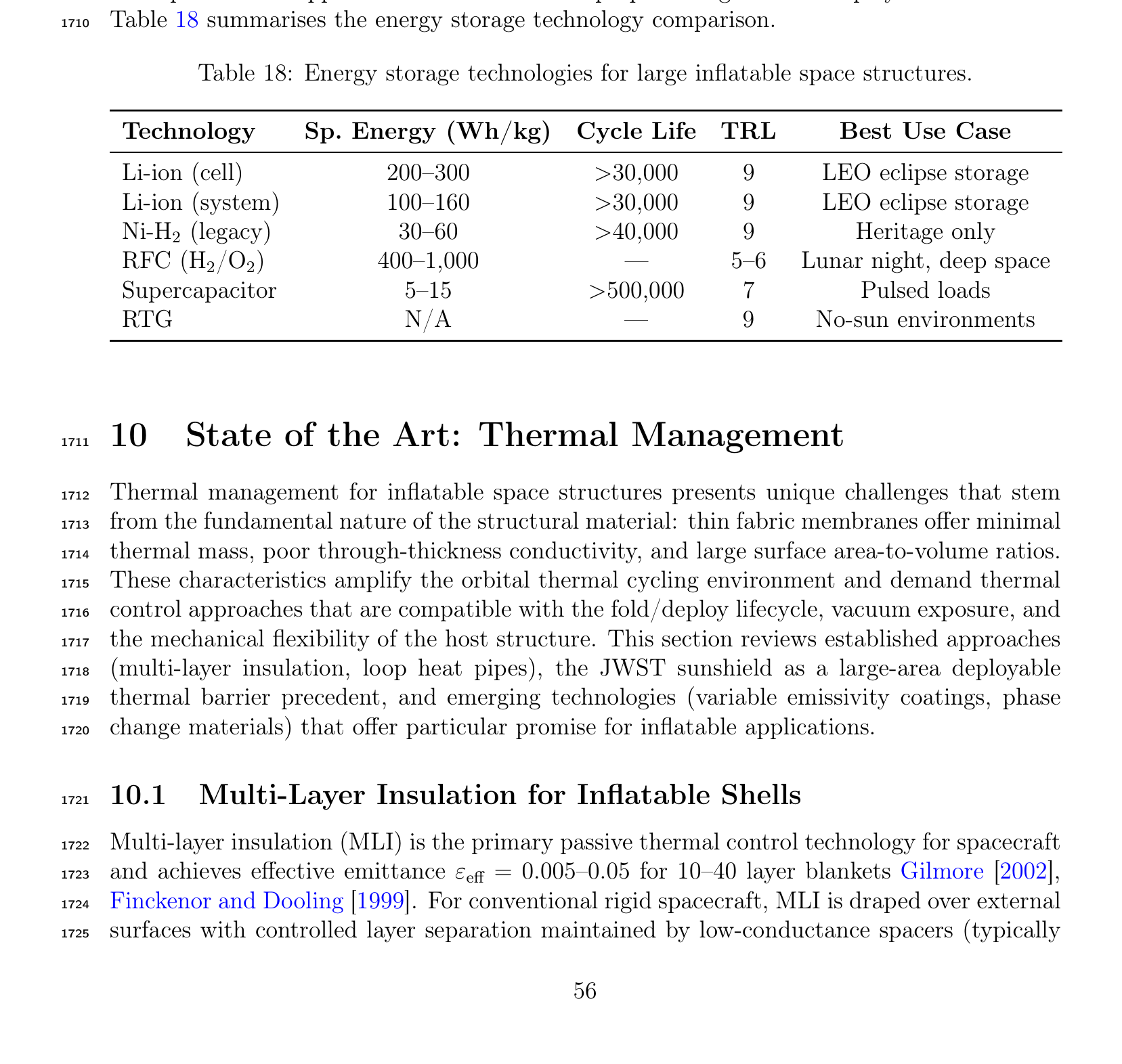
Table 18 summarises the energy storage technology comparison. 1710
Table 18: Energy storage technologies for large inflatable space structures.
Technology Sp. Energy (Wh/kg) Cycle Life TRL Best Use Case
Li-ion (cell) 200–300 >30,000 9 LEO eclipse storage Li-ion (system) 100–160 >30,000 9 LEO eclipse storage Ni-H2 (legacy) 30–60 >40,000 9 Heritage only RFC (H2/O2) 400–1,000 — 5–6 Lunar night, deep space Supercapacitor 5–15 >500,000 7 Pulsed loads RTG N/A — 9 No-sun environments
10 State of the Art: Thermal Management 1711
Thermal management for inflatable space structures presents unique challenges that stem 1712
from the fundamental nature of the structural material: thin fabric membranes offer minimal 1713
thermal mass, poor through-thickness conductivity, and large surface area-to-volume ratios. 1714
These characteristics amplify the orbital thermal cycling environment and demand thermal 1715
control approaches that are compatible with the fold/deploy lifecycle, vacuum exposure, and 1716
the mechanical flexibility of the host structure. This section reviews established approaches 1717
(multi-layer insulation, loop heat pipes), the JWST sunshield as a large-area deployable 1718
thermal barrier precedent, and emerging technologies (variable emissivity coatings, phase 1719
change materials) that offer particular promise for inflatable applications. 1720
10.1 Multi-Layer Insulation for Inflatable Shells 1721
Multi-layer insulation (MLI) is the primary passive thermal control technology for spacecraft 1722
and achieves effective emittance εeff = 0.005–0.05 for 10–40 layer blankets Gilmore [2002], 1723
Finckenor and Dooling [1999]. For conventional rigid spacecraft, MLI is draped over external 1724
surfaces with controlled layer separation maintained by low-conductance spacers (typically 1725
Dacron netting). For inflatable structures, MLI integration is more complex: the insulation 1726
must survive folding, accommodate deployment kinematics, and maintain layer separation 1727
without rigid structural support. 1728
The TransHab/BEAM heritage shell architecture represents the current standard for 1729
inflatable habitat thermal design Kennedy [2002], Valle et al. [2019a]. In this architecture, 1730
MLI forms the outermost thermal protection sub-assembly of a five-layer softgoods stack, 1731
ordered (outer to inner) as: (1) BETA cloth exterior for atomic oxygen protection; (2) nylon- 1732
reinforced double-aluminised Mylar/Kapton MLI layers with perforated inner surfaces for 1733
venting during deployment; (3) Nextel/Kevlar stuffed-Whipple MMOD shield; (4) Vectran 1734
restraint layer carrying hoop and axial pressure loads; and (5) multi-redundant gas-tight 1735
bladder. The MLI sub-assembly in TransHab comprised over 20 individual reflector layers 1736
with effective emittance on the order of 0.015–0.05 Finckenor and Dooling [1999]. 1737
BEAM’s on-orbit thermal performance has been characterised as “more benign than 1738
predicted” NASA Johnson Space Center [2017], an observation attributed to the additional 1739
insulation provided by folded softgoods layers that act as low-conductance barriers even 1740
when not specifically designed as MLI. This finding has positive implications for inflatable 1741
structure design: the inherent multi-layer nature of the fabric wall stack provides a degree 1742
of passive thermal buffering beyond that of the dedicated MLI layers alone. 1743
10.2 The JWST Sunshield as Deployable Thermal Barrier Prece- 1744
dent 1745
The James Webb Space Telescope (JWST) sunshield is the largest deployed thermal barrier 1746
ever flown and provides the benchmark for what large-area passive thermal isolation can 1747
achieve Arenberg et al. [2016]. At 21.2 m × 14.2 m (approximately 300 m2), the kite-shaped 1748
sunshield comprises five layers of Kapton E polyimide membrane: Layer 1 (sun-facing) at 1749
50 µm thickness, Layers 2–5 at 25 µm. All layers are coated with 100 nm aluminium on both 1750
sides for reflectivity; Layers 1 and 2 additionally carry 50 nm doped silicon on the sun-facing 1751
surface for enhanced emissivity and electrostatic discharge grounding. 1752
The thermal performance is extraordinary: the sun-facing side of Layer 1 reaches approx- 1753
imately +110 ◦C while the telescope-facing side of Layer 5 operates at −233 ◦C—a gradient 1754
of 343 ◦C across five layers. Incoming solar power of approximately 200–250 kW is attenu- 1755
ated to ∼23 mW transmitted to the cold side, an attenuation ratio of approximately 106:1 1756
Arenberg et al. [2016]. This performance is achieved through the V-groove geometry: angled 1757
layers radiate inter-layer thermal energy sideways to deep space through the vacuum gaps 1758
between membranes. 1759
However, the JWST sunshield is not an inflatable structure. Layer separation is main- 1760
tained by six rigid spreader bars, with centre gaps of ∼25–50 mm expanding to ∼250 mm 1761
at the edges. The deployment system required 139 of JWST’s 178 release mechanisms, 400 1762
pulleys, 90 cables (∼0.5 km total), 8 motors, and 70 hinges Arenberg et al. [2016]. Table 19 1763
compares the JWST sunshield and TransHab shell architectures. 1764
It should be noted that JWST operates at the Sun-Earth L2 point, not in LEO—the 1765
thermal environment is fundamentally different (no orbital cycling, no atmospheric drag, no 1766
atomic oxygen), and this limits the direct applicability of JWST thermal performance num- 1767
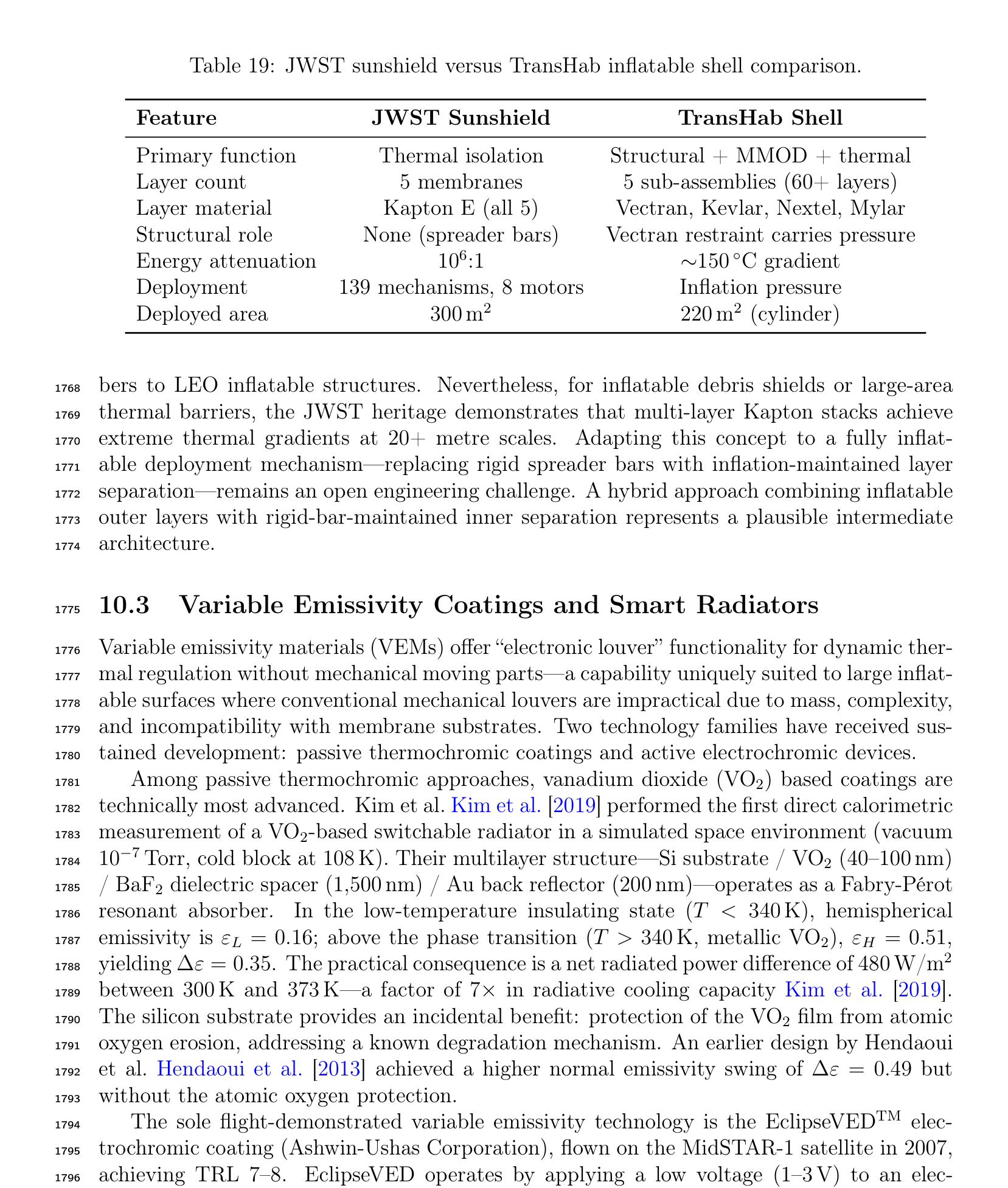
Table 19: JWST sunshield versus TransHab inflatable shell comparison.
Feature JWST Sunshield TransHab Shell
Primary function Thermal isolation Structural + MMOD + thermal Layer count 5 membranes 5 sub-assemblies (60+ layers) Layer material Kapton E (all 5) Vectran, Kevlar, Nextel, Mylar Structural role None (spreader bars) Vectran restraint carries pressure Energy attenuation 106:1 ∼150 ◦C gradient Deployment 139 mechanisms, 8 motors Inflation pressure Deployed area 300 m2 220 m2 (cylinder)
bers to LEO inflatable structures. Nevertheless, for inflatable debris shields or large-area 1768
thermal barriers, the JWST heritage demonstrates that multi-layer Kapton stacks achieve 1769
extreme thermal gradients at 20+ metre scales. Adapting this concept to a fully inflat- 1770
able deployment mechanism—replacing rigid spreader bars with inflation-maintained layer 1771
separation—remains an open engineering challenge. A hybrid approach combining inflatable 1772
outer layers with rigid-bar-maintained inner separation represents a plausible intermediate 1773
architecture. 1774
10.3 Variable Emissivity Coatings and Smart Radiators 1775
Variable emissivity materials (VEMs) offer “electronic louver” functionality for dynamic ther- 1776
mal regulation without mechanical moving parts—a capability uniquely suited to large inflat- 1777
able surfaces where conventional mechanical louvers are impractical due to mass, complexity, 1778
and incompatibility with membrane substrates. Two technology families have received sus- 1779
tained development: passive thermochromic coatings and active electrochromic devices. 1780
Among passive thermochromic approaches, vanadium dioxide (VO2) based coatings are 1781
technically most advanced. Kim et al. Kim et al. [2019] performed the first direct calorimetric 1782
measurement of a VO2-based switchable radiator in a simulated space environment (vacuum 1783
10−7 Torr, cold block at 108 K). Their multilayer structure—Si substrate / VO2 (40–100 nm) 1784
/ BaF2 dielectric spacer (1,500 nm) / Au back reflector (200 nm)—operates as a Fabry-Pérot 1785
resonant absorber. In the low-temperature insulating state (T < 340 K), hemispherical 1786
emissivity is εL = 0.16; above the phase transition (T > 340 K, metallic VO2), εH = 0.51, 1787
yielding ∆ε = 0.35. The practical consequence is a net radiated power difference of 480 W/m2 1788
between 300 K and 373 K—a factor of 7× in radiative cooling capacity Kim et al. [2019]. 1789
The silicon substrate provides an incidental benefit: protection of the VO2 film from atomic 1790
oxygen erosion, addressing a known degradation mechanism. An earlier design by Hendaoui 1791
et al. Hendaoui et al. [2013] achieved a higher normal emissivity swing of ∆ε = 0.49 but 1792
without the atomic oxygen protection. 1793
The sole flight-demonstrated variable emissivity technology is the EclipseVEDTM elec- 1794
trochromic coating (Ashwin-Ushas Corporation), flown on the MidSTAR-1 satellite in 2007, 1795
achieving TRL 7–8. EclipseVED operates by applying a low voltage (1–3 V) to an elec- 1796
trochromic polymer film, switching emissivity across the range ε ≈0.19–0.90 in the 8–12 µm 1797
thermal infrared band. It requires no mechanical actuators, making it compatible with large- 1798
area application including inflatable surfaces. The principal limitation is the requirement for 1799

a thin-film conductor and electrical interconnects across the deployed area—a tractable but 1800
non-trivial integration challenge for inflatable structures. 1801
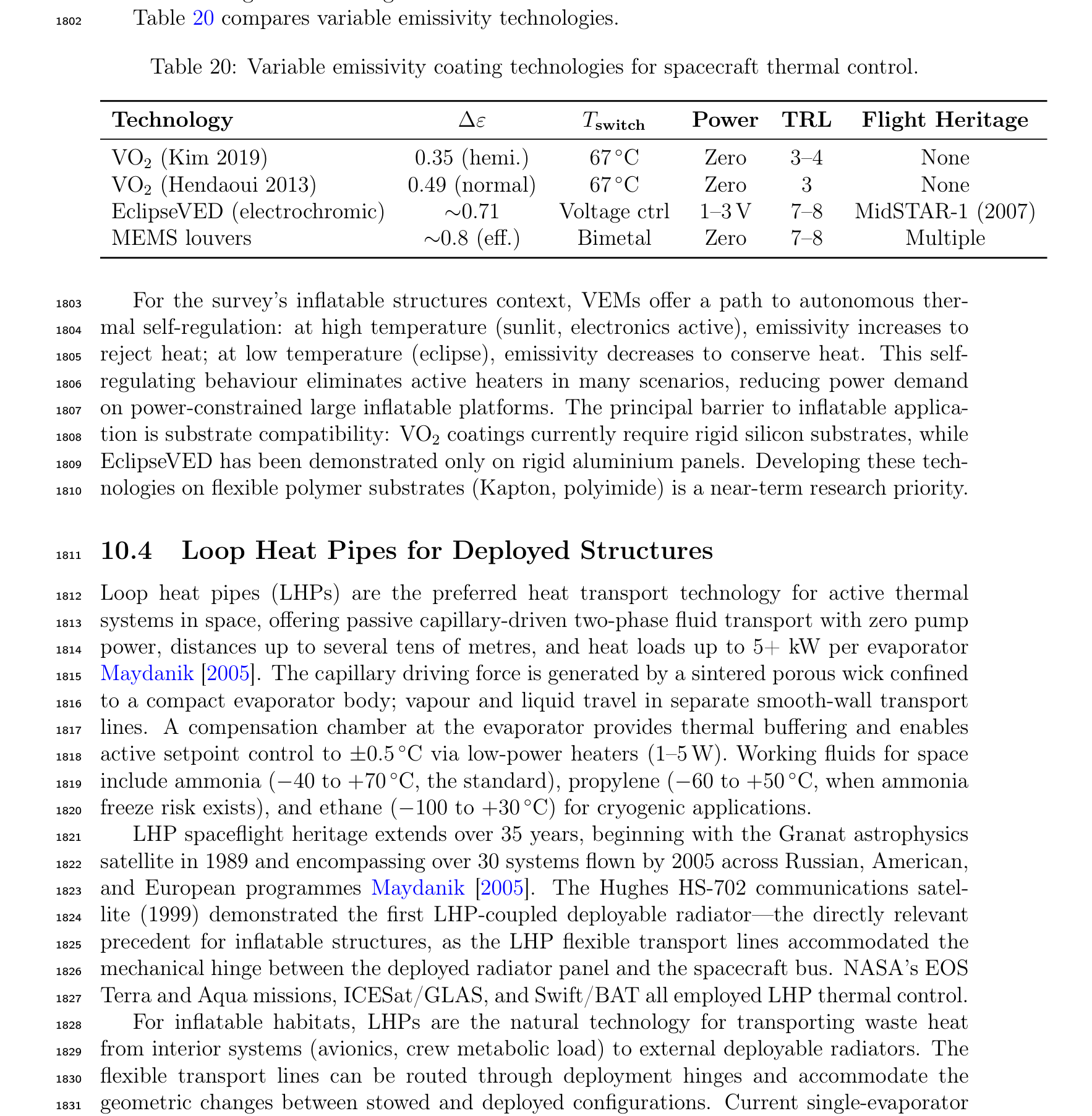
Table 20 compares variable emissivity technologies. 1802
Table 20: Variable emissivity coating technologies for spacecraft thermal control.
Technology ∆ε Tswitch Power TRL Flight Heritage
VO2 (Kim 2019) 0.35 (hemi.) 67 ◦C Zero 3–4 None VO2 (Hendaoui 2013) 0.49 (normal) 67 ◦C Zero 3 None EclipseVED (electrochromic) ∼0.71 Voltage ctrl 1–3 V 7–8 MidSTAR-1 (2007) MEMS louvers ∼0.8 (eff.) Bimetal Zero 7–8 Multiple
For the survey’s inflatable structures context, VEMs offer a path to autonomous ther- 1803
mal self-regulation: at high temperature (sunlit, electronics active), emissivity increases to 1804
reject heat; at low temperature (eclipse), emissivity decreases to conserve heat. This self- 1805
regulating behaviour eliminates active heaters in many scenarios, reducing power demand 1806
on power-constrained large inflatable platforms. The principal barrier to inflatable applica- 1807
tion is substrate compatibility: VO2 coatings currently require rigid silicon substrates, while 1808
EclipseVED has been demonstrated only on rigid aluminium panels. Developing these tech- 1809
nologies on flexible polymer substrates (Kapton, polyimide) is a near-term research priority. 1810
10.4 Loop Heat Pipes for Deployed Structures 1811
Loop heat pipes (LHPs) are the preferred heat transport technology for active thermal 1812
systems in space, offering passive capillary-driven two-phase fluid transport with zero pump 1813
power, distances up to several tens of metres, and heat loads up to 5+ kW per evaporator 1814
Maydanik [2005]. The capillary driving force is generated by a sintered porous wick confined 1815
to a compact evaporator body; vapour and liquid travel in separate smooth-wall transport 1816
lines. A compensation chamber at the evaporator provides thermal buffering and enables 1817
active setpoint control to ±0.5 ◦C via low-power heaters (1–5 W). Working fluids for space 1818
include ammonia (−40 to +70 ◦C, the standard), propylene (−60 to +50 ◦C, when ammonia 1819
freeze risk exists), and ethane (−100 to +30 ◦C) for cryogenic applications. 1820
LHP spaceflight heritage extends over 35 years, beginning with the Granat astrophysics 1821
satellite in 1989 and encompassing over 30 systems flown by 2005 across Russian, American, 1822
and European programmes Maydanik [2005]. The Hughes HS-702 communications satel- 1823
lite (1999) demonstrated the first LHP-coupled deployable radiator—the directly relevant 1824
precedent for inflatable structures, as the LHP flexible transport lines accommodated the 1825
mechanical hinge between the deployed radiator panel and the spacecraft bus. NASA’s EOS 1826
Terra and Aqua missions, ICESat/GLAS, and Swift/BAT all employed LHP thermal control. 1827
For inflatable habitats, LHPs are the natural technology for transporting waste heat 1828
from interior systems (avionics, crew metabolic load) to external deployable radiators. The 1829
flexible transport lines can be routed through deployment hinges and accommodate the 1830
geometric changes between stowed and deployed configurations. Current single-evaporator 1831
LHP systems transport 50–700 W in typical spacecraft configurations, with multi-loop archi- 1832
tectures providing aggregate capacities exceeding 10 kW for large platforms. The principal 1833
engineering challenge for inflatable integration is the condenser interface: bonding or me- 1834
chanically attaching the condenser panel to the flexible membrane requires a solution to the 1835
rigid-to-flexible interface problem discussed in Section 12.3. 1836
10.5 Phase Change Materials in Fabric Layers: The TRL 2–3 Gap 1837
Phase change materials (PCMs) offer passive thermal buffering by absorbing and releasing 1838
latent heat during orbital day/night transitions. For LEO inflatable habitats experiencing 1839
90-minute thermal cycles, the most promising PCM candidates are n-eicosane (melting point 1840
36.4 ◦C, latent heat 247–253 J/g) and n-octadecane (28.2 ◦C, 244 J/g) Diaconu et al. [2024]. 1841
PCM-based thermal control for rigid electronics enclosures has extensive spaceflight her- 1842
itage spanning from Apollo Lunar Roving Vehicle battery management (1971) through Mars 1843
rovers (Spirit, Opportunity, Curiosity, Perseverance; TRL 9) and ISS experiments (TRL 5–6) 1844
Diaconu et al. [2024]. 1845
However, integration of PCMs into flexible fabric layers for inflatable structures—the 1846
configuration needed to provide distributed thermal buffering across large membrane areas— 1847
remains at TRL 2–3. Five specific technical barriers have been identified: 1848
1. Microgravity containment: Liquid-phase PCM migrates freely in zero-g. Microen- 1849
capsulation (1–100 µm capsules) addresses this at small scale, but capsule integrity 1850
during the fold/deploy lifecycle has not been tested for space-grade materials. 1851
2. Fold/deploy cycling: PCM-loaded fabric must survive hundreds to thousands of 1852
fold/deploy cycles without capsule rupture—a requirement with no demonstrated so- 1853
lution in the space-qualified materials literature. 1854
3. Outgassing: PCM solvents and vapour can contaminate optical surfaces (solar cells, 1855
sensors). Space-qualified encapsulation that meets ASTM E595 outgassing require- 1856
ments has not been characterised for PCM-textile systems. 1857
4. Thermal conductivity: Raw paraffin PCMs have thermal conductivity k ≈0.2 W/(m·K)— 1858
approximately 1,000× lower than aluminium—resulting in slow thermal response. Car- 1859
bon nanotube or graphene additives can improve conductivity to 1–5 W/(m·K) but at 1860
the cost of reduced fabric flexibility and increased mass. 1861
5. Atomic oxygen interaction: PCM capsule shells (typically PMMA or gelatin) may 1862
erode under atomic oxygen flux in LEO, releasing PCM material and contaminating 1863
the local environment. 1864
Despite these barriers, the potential benefit is substantial. A 1 kg/m2 layer of microencap- 1865
sulated n-eicosane would provide ∼250 J/g × 1,000 g/m2 = 250 kJ/m2 of thermal storage— 1866
sufficient to buffer the first ∼10 minutes of eclipse entry for a membrane with low thermal 1867
mass, significantly reducing peak-to-trough temperature excursions. The technology needs 1868
a structured development programme analogous to what IRVE provided for flexible thermal 1869
protection systems. 1870
11 State of the Art: Attitude and Orbit Control 1871
Attitude and orbit control for large inflatable space structures is dominated by a single over- 1872
arching challenge: control-structure interaction (CSI). When structural flexibility approaches 1873
or overlaps the attitude control bandwidth, conventional rigid-body AOCS designs become 1874
inadequate or unstable. For 100 m-class inflatable structures, where the lowest natural fre- 1875
quencies may fall well below 0.1 Hz, CSI is not merely a complication—it is the central design 1876
driver. This section reviews the CSI challenge, the theoretical framework of gyroelastic body 1877
dynamics, the drag budget for large LEO structures, and the critical gap in AOCS theory 1878
for pressure-stabilised membranes. 1879
11.1 Control-Structure Interaction for Flexible Spacecraft 1880
CSI has been studied since the 1970s in the context of large space systems including the 1881
Solar Power Satellite concept, the Space Station, and large deployable antennas. For me- 1882
chanically stiff structures—rigid trusses, mesh antennas, deployable solar arrays—the lowest 1883
structural modes typically fall in the 0.1–1 Hz range for 10–30 m scale structures, and struc- 1884
tural damping ratios ζ ≈0.001–0.005 are small but predictable Angeletti et al. [2022]. The 1885
standard approach is modal truncation and notch filtering: identify the structural modes, ex- 1886
clude them from the control bandwidth, and ensure adequate frequency separation between 1887
rigid-body and flexible modes. 1888
For inflatable (pressure-stabilised) structures, the CSI problem is qualitatively different 1889
in four respects. First, structural stiffness is primarily provided by membrane tension arising 1890
from internal pressure (σhoop = pR/t for a cylindrical geometry) rather than material bending 1891
stiffness, and this stiffness changes if pressure is lost due to microleaks or thermal cycling. 1892
Second, the lowest natural frequencies scale inversely with structure size and can be ≪ 1893
0.1 Hz for 100 m-class structures, potentially falling within the AOCS bandwidth. Third, 1894
membranes cannot carry compressive stress—they wrinkle, creating local zones of nonlinear 1895
stiffness that invalidate linear modal analysis. Fourth, actuator forces transmitted through a 1896
flexible membrane diffuse spatially rather than transmitting cleanly through a rigid structural 1897
path, degrading actuator-to-mode coupling. No paper in the published literature explicitly 1898
addresses AOCS for pressure-stabilised inflatable structures at the 100 m scale. 1899
Angeletti et al. Angeletti et al. [2022] developed a “minimum complexity” hybrid ODE- 1900
PDE model for large flexible spacecraft that provides a useful methodological template: the 1901
rigid bus is treated as an ODE system (6 DOF) coupled to the flexible structure as a PDE 1902
system (beam/plate). Even a 2-mode truncation captured over 80% of the relevant dynamics 1903
for control design. However, this framework assumes conventional bending stiffness and is 1904
not directly applicable to pressure-stabilised membranes. 1905
11.2 Gyroelastic Body Theory and Distributed Momentum Man- 1906
agement 1907
The theoretical foundation for distributed attitude actuators on flexible structures was estab- 1908
lished by D’Eleuterio and Hughes in a series of foundational papers D’Eleuterio and Hughes 1909
[1984, 1986, 1987]. The 1984 paper introduced the concept of gyricity—the distribution of 1910
angular momentum per unit volume embedded within an elastic continuum. The governing 1911
equations couple elastic deformation to rigid-body rotation through the gyricity distribu- 1912
tion g(x), showing that distributed angular momentum fundamentally modifies elastic wave 1913
propagation and natural frequencies. The key theoretical finding is that gyroelastic systems 1914
have complex eigenvalues (gyroelastic frequency splitting), providing passive damping-like 1915
behaviour without explicit energy dissipation—analogous to Zeeman splitting in quantum 1916
mechanics D’Eleuterio and Hughes [1984]. The 1986 companion paper D’Eleuterio and 1917
Hughes [1986] derived the modal parameters (complex mode shapes, orthogonality condi- 1918
tions, participation factors) needed for practical numerical analysis, while the 1987 paper 1919
D’Eleuterio and Hughes [1987] extended the framework to complete spacecraft systems, 1920
treating a vehicle with distributed angular momentum storage as a unified gyroelastic body. 1921
Damaren and D’Eleuterio Damaren and D’Eleuterio [1989] solved the optimal gyricity 1922
distribution problem using calculus of variations: the spatial distribution g∗(x) that min- 1923
imises a quadratic performance index concentrates angular momentum where modal kinetic 1924
energy is highest—at the antinodes of the dominant vibration modes. This is directly analo- 1925
gous to collocating sensors at modal antinodes and provides the theoretical basis for actuator 1926
placement optimisation on large flexible structures. 1927
The most recent quantitative validation of distributed momentum management was pro- 1928
vided by Cachim et al. Cachim et al. [2025], who compared centralized (6 large reaction 1929
wheels on the bus) versus distributed (33 small reaction wheels throughout the structure) 1930
attitude control for a ∼30 m hexagonal plate-like structure (4,200 kg, Jxx = 2.2×105 kg·m2). 1931
Using LQG control with 25 retained modes below 80 Hz, the distributed configuration 1932
achieved 3.3× faster settling (30 s versus 100 s), 7× less structural deformation (0.33 µm 1933
versus 2.3 µm) during a 0.5◦slew, and improved fine pointing (RMS error 0.038 versus 1934
0.068 arcsec), at the cost of approximately 2× more total torque Cachim et al. [2025]. The 1935
structure was modelled as a Kirchhoff plate (bending-only, shear neglected), which is valid 1936
for thin plates with thickness-to-span ratio >1:30 but is not applicable to pressure-stabilised 1937
membranes. 1938
11.3 Drag Budget for 100 m-Class LEO Structures 1939
A 100 m-class inflatable structure in LEO faces a severe drag penalty due to its extreme 1940
area-to-mass ratio. At 500 km altitude, representative NRLMSISE-00 density anchors vary 1941
from ρ ≈5 × 10−13 kg/m3 at solar minimum (F10.7 ≈70 sfu) to ρ ≈3 × 10−12 kg/m3 at solar 1942
maximum (F10.7 ≈200 sfu)—a factor of 6× variation driven by solar EUV heating of the 1943
upper atmosphere Picone et al. [2002], Jiang et al. [2023], Andreussi et al. [2022]. For a 100 m 1944
diameter circular membrane presented broadside to the velocity vector (Aeff ≈7,850 m2), the 1945
drag force FD = 1
2ρv2CDA yields the estimates in Table 21. 1946
The drag coefficient range of CD = 2.4–3.2 for a flat membrane in free molecular flow is 1947
based on the standard models of Sentman Sentman [1961] and Moe and Moe Moe and Moe 1948
[2005], where the upper bound corresponds to complete diffuse reflection with full thermal 1949
accommodation on atomic oxygen surfaces. 1950
The area-to-mass ratio is the fundamental problem: if the 100 m structure totals 5,000 kg, 1951
A/m ≈1.6 m2/kg (broadside), compared to ∼0.02 m2/kg for the ISS—approximately 80× 1952
higher. Using the ballistic coefficient β = m/(CDA), the corrected drag loads still imply 1953
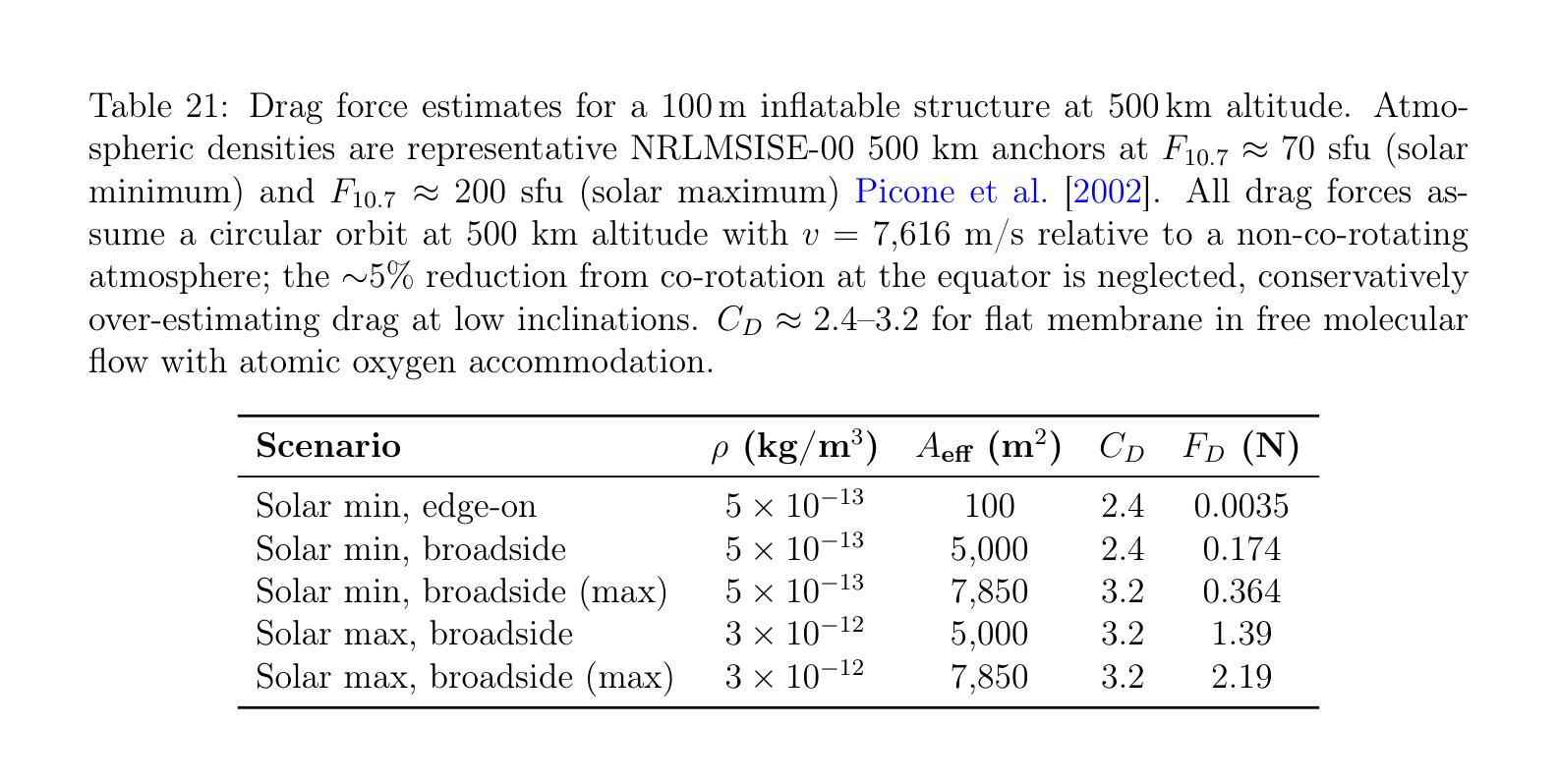
Table 21: Drag force estimates for a 100 m inflatable structure at 500 km altitude. Atmo- spheric densities are representative NRLMSISE-00 500 km anchors at F10.7 ≈70 sfu (solar minimum) and F10.7 ≈200 sfu (solar maximum) Picone et al. [2002]. All drag forces as- sume a circular orbit at 500 km altitude with v = 7,616 m/s relative to a non-co-rotating atmosphere; the ∼5% reduction from co-rotation at the equator is neglected, conservatively over-estimating drag at low inclinations. CD ≈2.4–3.2 for flat membrane in free molecular flow with atomic oxygen accommodation.
Scenario ρ (kg/m3) Aeff (m2) CD FD (N)
Solar min, edge-on 5 × 10−13 100 2.4 0.0035 Solar min, broadside 5 × 10−13 5,000 2.4 0.174 Solar min, broadside (max) 5 × 10−13 7,850 3.2 0.364 Solar max, broadside 3 × 10−12 5,000 3.2 1.39 Solar max, broadside (max) 3 × 10−12 7,850 3.2 2.19
100 m diameter structure, CD = 2.4
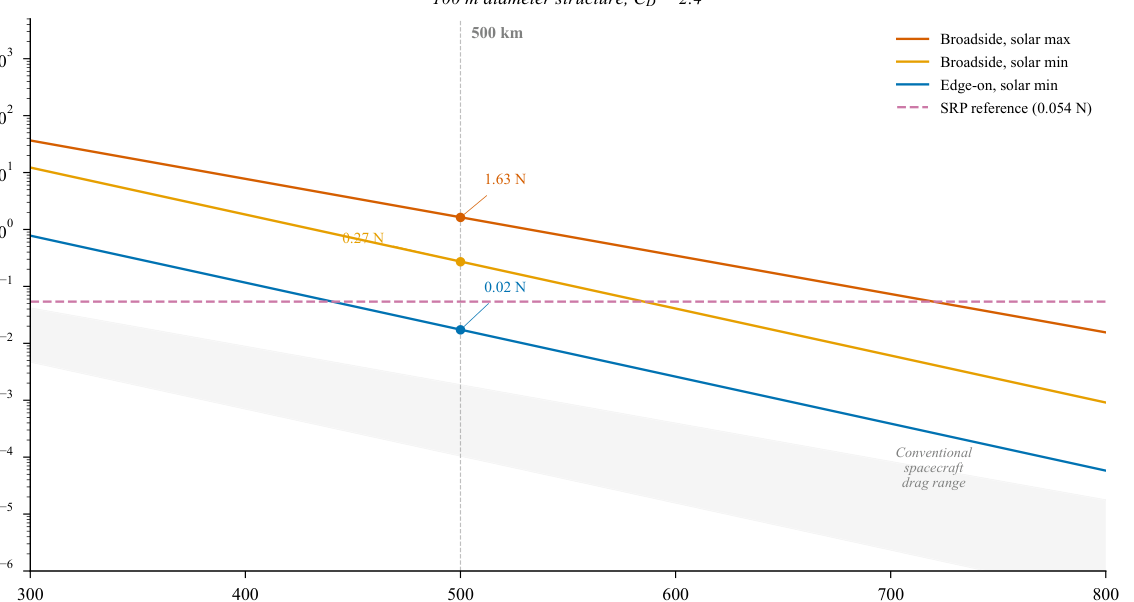
500 km
Broadside, solar max Broadside, solar min Edge-on, solar min SRP reference (0.054 N)
10 3
10 2
10 1
1.63 N
10 0
0.27 N
Drag force (N)
10 −1
0.02 N
10 −2
10 −3
10 −4
Conventional
spacecraft drag range
10 −5
10 −6
300 400 500 600 700 800 Altitude (km)
Figure 11: Drag force versus altitude for a 100 m diameter inflatable structure in LEO using CD = 2.4 nominally; Table 21 gives the CD = 3.2 sensitivity cases. The solar-minimum and solar-maximum density curves use exponential interpolation with scale heights H = 53 km and H = 65 km, respectively, anchored to representative NRLMSISE-00 densities at 500 km Picone et al. [2002]. The shaded region illustrates the factor-of-six variation in atmospheric density driven by the solar cycle, which dominates the orbit maintenance propellant budget.
that the orbital decay time at 500 km during solar maximum would be measured in months 1954
for sustained broadside orientation, not years. 1955
Second-Order Effects 1956
Three additional forces merit consideration for a complete 100 m-class force budget: 1957
Solar radiation pressure (SRP): For a 100 m diameter membrane at 500 km, the SRP 1958
force is FSRP = (P⊙/c) · A · (1 + r) ≈(4.56 × 10−6 N/m2) × 7,850 m2 × 1.5 ≈0.054 N, where 1959
P⊙= 1,361 W/m2 is the solar flux, c is the speed of light, and r ≈0.5 is the reflectivity. 1960
This SRP force is larger than the drag at solar minimum edge-on (0.0035 N) and is within a 1961
factor of four of the solar-minimum broadside case (0.174 N), so it is a first-order disturbance 1962
for lightly loaded membranes. 1963
Attitude-dependent cross-section: The table presents edge-on (100 m2) and broad- 1964
side (7,850 m2) as discrete cases, but a real membrane oscillates between attitudes unless 1965
actively controlled. The time-averaged effective area depends on AOCS capability—coupling 1966
the drag analysis to the AOCS gap (C4). Passive spin stabilisation about the minimum- 1967
inertia axis would yield a time-averaged Aeff intermediate between edge-on and broadside, 1968
approximately 0.5×Abroadside ≈3,900 m2, roughly halving the broadside drag but still orders 1969
of magnitude above edge-on. 1970
Propellant mass rate derivation: The xenon propellant consumption for Hall thruster 1971
drag compensation can be derived as ˙m = FD/(g0Isp), where g0 = 9.81 m/s2 and Isp = 3,000 s 1972
for a representative Hall thruster. For the solar-minimum broadside case (FD = 0.174 N): 1973
˙m = 0.174/(9.81 × 3,000) = 5.91 × 10−6 kg/s = 0.51 kg/day = 187 kg/year. For the solar- 1974
maximum broadside sensitivity case (FD = 2.19 N): ˙m = 2.19/(9.81 × 3,000) = 7.44 × 1975
10−5 kg/s = 6.4 kg/day. This is challenging for long-duration missions, but no longer orders 1976
of magnitude beyond ISS-class reboost logistics. The corresponding thrust power is P = 1977
FDve/(2η), where ve = g0Isp = 29,430 m/s and η = 0.6 (thruster efficiency): yielding 1978
4.3 kW for the solar-minimum broadside case and 54 kW for the solar-maximum broadside 1979
sensitivity case. The 1–50 kW range stated in Section 13.2 corresponds to solar-minimum 1980
through near-worst-case conditions with some edge-on attitude control. 1981
Air-Breathing Electric Propulsion (ABEP), which collects atmospheric gas for use as 1982
propellant, has been proposed for drag compensation in Very Low Earth Orbit (VLEO, 1983
150–450 km) Andreussi et al. [2022]. However, at 500 km the atmospheric density is approx- 1984
imately 100× lower than at the 250–350 km altitudes where ABEP is designed to operate, 1985
reducing achievable thrust to 0.001–0.1 mN—orders of magnitude insufficient for the 0.17– 1986
2.2 N broadside drag forces computed above. Conventional electric propulsion (Hall effect 1987
or gridded ion thrusters) with onboard xenon propellant is the only viable station-keeping 1988
option. This propulsion requirement fundamentally constrains mission architecture and rep- 1989
resents a significant fraction of the overall mass budget. 1990
11.4 The Missing Theory: AOCS for Pressure-Stabilised Mem- 1991
branes 1992
The gyroelastic body framework of D’Eleuterio and Hughes assumes elastic continua with 1993
Cauchy stress tensor constitutive relations—valid for beams, plates, and shells with inher- 1994
ent bending stiffness. Extending this framework to pressure-stabilised inflatable membranes 1995
requires four theoretical modifications that represent a significant gap in the published lit- 1996
erature: 1997
1. Pressure-stiffness coupling: For an inflatable structure, the effective stiffness Keff = 1998
Kmembrane + Kpressure, where the pressure contribution depends on inflation state and 1999
couples to deformation through the ideal gas law. When pressure changes due to mi- 2000
croleaks or thermal cycling, natural frequencies shift and gyroelastic modes reconfigure— 2001
a time-varying system for which fixed-gain controllers may become unstable. 2002
2. Wrinkling constraint: Membranes cannot carry compressive stress; they wrinkle, 2003
creating zones where σn = max(0, Tmembrane · εn). This state-dependent nonlinearity 2004
causes mode shapes to change with the deformation state, invalidating the linear modal 2005
analysis assumption that underpins both the D’Eleuterio framework and the Cachim 2006
optimisation. 2007
3. Orthotropic fabric constitutive model: Space fabrics (Vectran, Kevlar) are woven 2008
materials with highly anisotropic stiffness—warp versus weft direction stiffness can 2009
differ by 2–5×. The isotropic elastic continuum in the D’Eleuterio formulation requires 2010
replacement with an orthotropic constitutive model. 2011
4. Gas-structure interaction coupling: For large inflatable volumes, internal gas has 2012
its own dynamics (acoustic modes, pressure wave propagation). This is analogous to 2013
liquid sloshing in fuel tanks—a well-studied problem—but the gas-structure coupling 2014
for inflatable membranes has received no published treatment. 2015
Each of these extensions builds upon established prior work, and the timeline can be 2016
estimated with some granularity: 2017
• Pressure-stiffness coupling (estimated 3–4 years): The coupling of inflation pressure 2018
to membrane stiffness is well-understood for simple geometries through the gossamer 2019
structure dynamics literature Jenkins [2001]. The novel challenge is coupling this to the 2020
gyroelastic formulation, requiring a pressure-dependent constitutive model within the 2021
D’Eleuterio framework. This is the most tractable extension and could be addressed 2022
within a focused doctoral programme. 2023
• Wrinkling constraint (estimated 3–4 years): Tension-field theory Stein and Hedgepeth 2024
[1961] provides a well-established framework for membranes that cannot sustain com- 2025
pression. Roddeman et al. Roddeman et al. [1987] developed the modern computa- 2026
tional treatment. Integrating wrinkling-induced state-dependent stiffness into gyroe- 2027
lastic eigenvalue analysis is non-trivial but has analogues in rotor dynamics (cracked 2028
shaft models with breathing cracks). 2029
• Orthotropic fabric constitutive model (estimated 1–2 years): Replacing isotropic 2030
with orthotropic constitutive relations requires substituting the appropriate fourth- 2031
order stiffness tensor into the D’Eleuterio equations. The D’Eleuterio formulation uses 2032
the general Cauchy stress tensor, making the extension algebraically systematic. This 2033
is the most tractable extension and could constitute the early phase of a doctoral 2034
programme or a Master’s thesis. 2035
• Gas-structure interaction coupling (estimated 4–5 years): This is the most novel 2036
and uncertain extension. The fuel-sloshing analogy Abramson [1966] is useful but 2037
incomplete—gas is compressible while classical sloshing models assume incompressibil- 2038
ity. Coupled gas-membrane problems have been studied in the aeroelasticity literature 2039
(flutter of inflated membrane wings Leclercq and de Langre [2018]), providing a starting 2040
point, but the three-dimensional coupling for large inflatable volumes in the gyroelastic 2041
context has no precedent. This is the genuine multi-year research challenge. 2042
The total estimated timeline is 12–15 years if pursued sequentially by individual doctoral 2043
candidates, or 5–7 years if pursued in parallel by a coordinated research group with 2–3 2044
concurrent doctoral projects. The sequential estimate of 10–15 years stated in Section 13 2045
is therefore conservative but reasonable. This is among the most significant fundamental 2046
research gaps identified in this survey. 2047
12 State of the Art: Robotic In-Orbit Assembly 2048
The vision of large inflatable space structures—100 m-class debris shields, large-aperture 2049
antenna reflectors, or orbital habitats exceeding ISS volume—will likely require in-orbit 2050
assembly of subsystems that exceed the launch vehicle fairing envelope or are too complex 2051
for single-deployment architectures. This section reviews the state of in-space servicing, 2052
assembly, and manufacturing (ISAM) robotics, the E-Walker concept for walking robots on 2053
large structures, and the critical gap in rigid-to-flexible interface technology that currently 2054
prevents assembly on inflatable substrates. 2055
12.1 Assembly Robot Heritage and Current Programmes 2056
In-orbit robotic assembly heritage begins with the ISS, whose construction (1998–2011) relied 2057
on the Canadarm2 Space Station Remote Manipulator System (SSRMS): a 17.6 m, 7-DOF 2058
arm operating from fixed Power Data Grapple Fixtures (PDGFs) on the truss structure. 2059
Canadarm2 demonstrated that large-scale orbital assembly is achievable with telerobotic 2060
systems, but at the cost of extensive EVA support and ground-in-the-loop operations. 2061
The ISAM landscape has expanded substantially since ISS assembly. NASA’s 2025 State 2062
of Play report catalogues 524 capability entries across 145 developers in 21 countries, with 2063
over $2 billion in government investment NASA [2025]. Current programmes span mul- 2064
tiple technology readiness levels: GITAI’s S2 experiment demonstrated autonomous ISS 2065
solar array assembly (2021); Project GHOST validated tool manipulation in orbit (2024); 2066
DARPA’s NOM4D programme targets LEO truss assembly demonstration by Caltech in 2067
2026; and NASA Langley’s CIRAS/TALISMAN/SAMURAI/NINJAR ground demonstra- 2068
tions have validated multi-robot truss assembly at 15 m scale Li et al. [2022c], Doggett et al. 2069
[2018]. The European PULSAR project targets autonomous assembly of a 12 m telescope 2070
mirror Rognant et al. [2019]. Northrop Grumman’s MEV-1 (2020) and MEV-2 (2021) rep- 2071
resent the first commercial ISAM operations, though these are servicing (docking with client 2072
spacecraft) rather than structural assembly. 2073
A critical observation for the present survey is that all 524 entries in the NASA ISAM 2074
catalogue address assembly of rigid structures—trusses, beams, modular satellites, and mir- 2075
ror segments NASA [2025]. Not a single entry addresses assembly on or of inflatable/flexible 2076
substrates. This is not a mere omission; it reflects a fundamental gap in the technology base: 2077
the rigid-to-flexible interface problem remains unsolved (Section 12.3). 2078
12.2 Walking Robots for Large Structure Assembly: E-Walker 2079
The End-over-End Walking Robot (E-Walker) represents the current state of the art in 2080
walking manipulators designed for ISAM missions Nair et al. [2022, 2024]. Inheriting the 2081
Canadarm2 design philosophy of end-over-end locomotion via grapple fixtures, the E-Walker 2082
is a 7-DOF dexterous manipulator at full scale of approximately 475 kg with 350 kg pay- 2083
load capacity—sufficient to handle one primary mirror segment for a 25 m Large Aperture 2084
Space Telescope (LAST). Maximum joint torque reaches ∼70 Nm at Joint 2, and finite ele- 2085
ment analysis confirms maximum link deflection of only 0.04 mm under full payload, with a 2086
buckling safety factor exceeding 129 Nair et al. [2022]. 2087
A scaled prototype (1.3 m, 12 kg, 2 kg payload at 1:6 scale) has been demonstrated in 2088
ground testing. Nair et al. Nair et al. [2024] evaluated 11 concepts of operations for 25 m 2089
telescope assembly, concluding that a dual E-Walker configuration is optimal. The 8 m E- 2090
Walker requires 4.5 m less workspace than an equivalent fixed-base arm, making walking 2091
locomotion particularly advantageous for assembly tasks distributed over large structures. 2092
However, all E-Walker analysis assumes a rigid assembly substrate. The grapple fix- 2093
tures are ISS-standard PDGFs requiring rigid interfaces with ±10 mm capture tolerance and 2094
multi-kN load capacity. When the E-Walker applies 70 Nm joint torques during assembly 2095
operations, Newton’s third law transmits equal and opposite reactions into the mounting 2096
substrate. On the ISS rigid truss, these are absorbed globally; on an inflatable membrane, 2097
they would cause local deformation, potential wrinkling, and excitation of global vibration 2098
modes. The 475 kg robot’s every movement in microgravity creates reaction forces that, on 2099
a flexible membrane, propagate as structural disturbances. 2100
12.3 The Rigid-to-Flexible Interface Gap 2101
All existing docking and assembly interfaces assume rigid-to-rigid connections. Liu et al. 2102
Liu et al. [2024] designed an androgynous docking port with ±23.5 mm translation tolerance 2103
for on-orbit assembly—a practical engineering specification for robotically-assisted mating 2104
of rigid modules. ISS Power Data Grapple Fixtures, common berthing mechanisms, and all 2105
ISAM interface concepts in the literature share this rigid-to-rigid assumption. 2106
No published work specifically addresses distributed rigid-module attachment to inflat- 2107
able membranes in the space environment. However, several bodies of adjacent work provide 2108
relevant design heritage that should be acknowledged: 2109
• Tensegrity structures: Tensegrity platforms Skelton and de Oliveira [2009] inher- 2110
ently address the rigid-to-flexible interface through bar-cable connections. NASA 2111
Ames’ Super Ball Bot Sabelhaus et al. [2015] demonstrates rigid node attachment to 2112
tensioned cables in a reconfigurable structure; the load-spreading problem at hardpoint- 2113
membrane interfaces is structurally analogous to the bar-cable joint in tensegrity. 2114
• Deployable antenna feed support: Large deployable mesh antennas (Harris/L3 2115
AstroMesh, Northrop Grumman CRAF) attach a rigid feed assembly to a tensioned 2116
cable-net/mesh reflector surface Santiago-Prowald and Rodrigues [2018]. The feed 2117
support struts connect rigid hardware to a flexible, tension-stabilised structure—a 2118
direct analogue to the rigid-module-on-inflatable-membrane problem. 2119
• Solar sail boom-membrane attachment: Solar sail designs (e.g., IKAROS, NEA 2120
Scout) attach rigid booms to thin-film membranes via reinforced corner fittings. The 2121
stress concentration and load distribution at these attachment points have been anal- 2122
ysed in the solar sail literature Fernandez et al. [2014]. 2123
The gap remains genuine: none of these analogues addresses the full combination of vac- 2124
uum, thermal cycling, atomic oxygen, micrometeoroid exposure, and zero-gravity dynamics 2125

on an inflatable pressure-stabilised substrate. The adjacent work provides starting points 2126
for analysis but not validated solutions. 2127
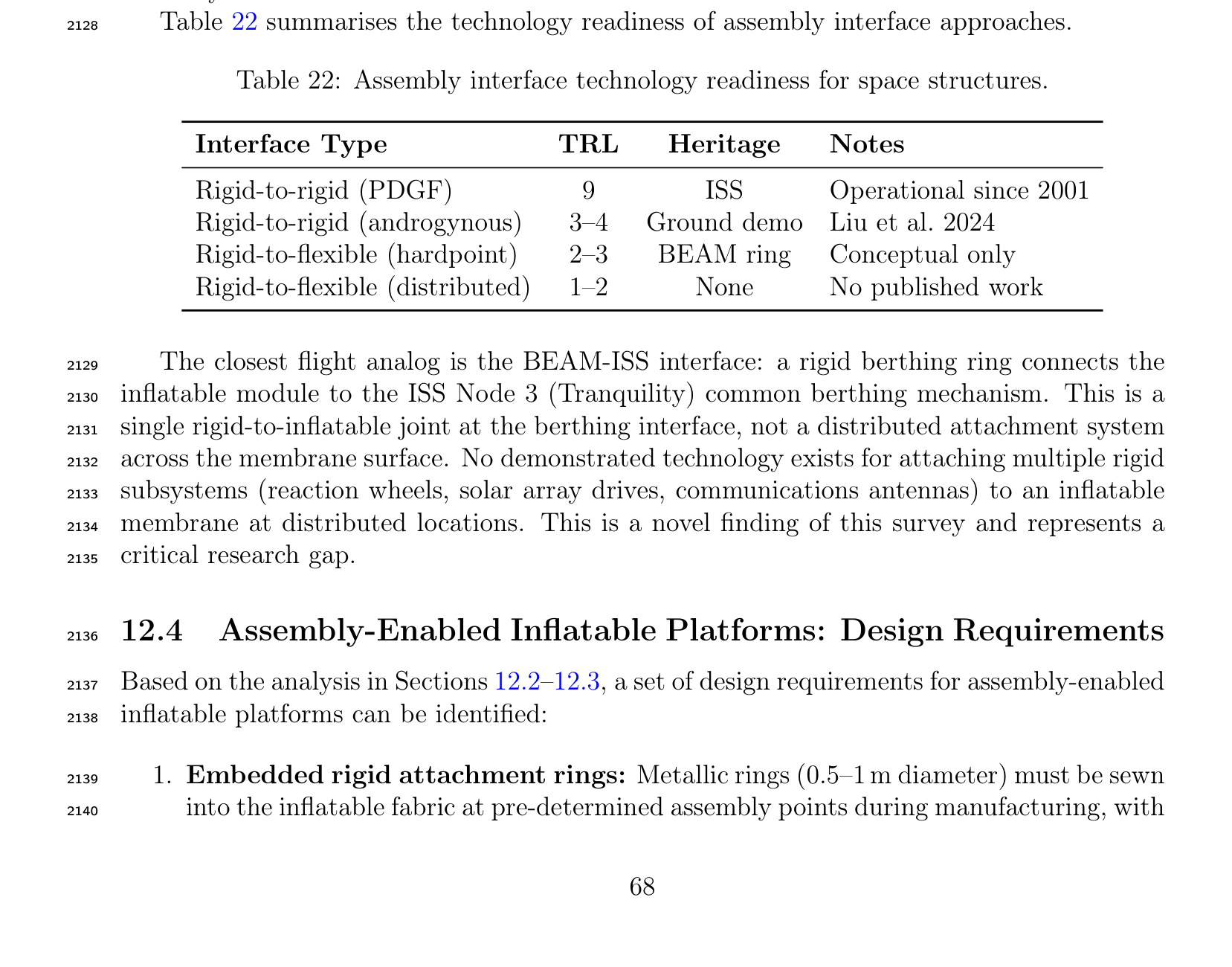
Table 22 summarises the technology readiness of assembly interface approaches. 2128
Table 22: Assembly interface technology readiness for space structures.
Interface Type TRL Heritage Notes
Rigid-to-rigid (PDGF) 9 ISS Operational since 2001 Rigid-to-rigid (androgynous) 3–4 Ground demo Liu et al. 2024 Rigid-to-flexible (hardpoint) 2–3 BEAM ring Conceptual only Rigid-to-flexible (distributed) 1–2 None No published work
The closest flight analog is the BEAM-ISS interface: a rigid berthing ring connects the 2129
inflatable module to the ISS Node 3 (Tranquility) common berthing mechanism. This is a 2130
single rigid-to-inflatable joint at the berthing interface, not a distributed attachment system 2131
across the membrane surface. No demonstrated technology exists for attaching multiple rigid 2132
subsystems (reaction wheels, solar array drives, communications antennas) to an inflatable 2133
membrane at distributed locations. This is a novel finding of this survey and represents a 2134
critical research gap. 2135
12.4 Assembly-Enabled Inflatable Platforms: Design Requirements 2136
Based on the analysis in Sections 12.2–12.3, a set of design requirements for assembly-enabled 2137
inflatable platforms can be identified: 2138
1. Embedded rigid attachment rings: Metallic rings (0.5–1 m diameter) must be sewn 2139
into the inflatable fabric at pre-determined assembly points during manufacturing, with 2140
integrated load-spreading plates to distribute reaction forces over sufficient membrane 2141
area. The stress concentration factor at such embedded hardpoints (2–5× local stress 2142
amplification) must be accounted for in the membrane structural design. 2143
2. Compliance layer: A 3–5 mm silicone or elastomeric foam layer between each rigid 2144
attachment ring and the membrane accommodates local deformation and provides 2145
vibration isolation, preventing point-load damage to the fabric. 2146
3. Pre-integration requirement: Retrofitting hardpoints onto an already-deployed 2147
inflatable is impractical. All assembly interfaces must be designed in and manufactured 2148
as part of the inflatable structure before launch. This implies that the assembly concept 2149
of operations must be fully defined before the inflatable is manufactured—a significant 2150
systems engineering constraint. 2151
4. Active vibration isolation: Small dampers or isolation mounts between each E- 2152
Walker grapple point and the membrane surface attenuate reaction forces from assem- 2153
bly operations, reducing excitation of global membrane vibration modes. 2154
5. Pressure-aware operations: Assembly operations that change the mass distribu- 2155
tion (adding subsystems) alter both the inertia tensor and the natural frequencies of 2156
the inflatable structure. AOCS must accommodate these time-varying dynamics— 2157
connecting to the gap identified in Section 11.4. 2158
The E-Walker on an inflatable platform is conditionally feasible with pre-integrated hard- 2159
points, compliance layers, and active vibration isolation. However, none of these solutions has 2160
been demonstrated even at component level for space applications. A ground demonstration 2161
programme—analogous to NASA Langley’s CIRAS/TALISMAN truss assembly demonstra- 2162
tions but on an inflatable test article—would represent a significant advance toward closing 2163
this gap. 2164
13 Challenges, Open Questions, and Research Roadmap 2165
The preceding eight technology surveys (Sections 5–12) have documented a paradox that 2166
defines the current state of soft inflatable robotic systems for space: individual enabling tech- 2167
nologies have reached moderate-to-high readiness levels—Vectran restraint layers at TRL 9 2168
(Section 5), shape memory alloy deployment actuators at TRL 8–9 (Section 7.5), fibre Bragg 2169
grating sensors on rigid spacecraft at TRL 7–8 (Section 8.1)—yet no integrated soft inflat- 2170
able robotic system has been demonstrated in space. This section consolidates the research 2171
gaps identified throughout the survey, assesses their severity and interdependence, proposes 2172
a structured research roadmap spanning 5-year and 15-year horizons, and identifies the most 2173
viable path to a near-term flight demonstration. 2174
13.1 Critical Research Gaps 2175
A systematic analysis of the technology areas reviewed in Sections 5–12 reveals 5 critical 2176
gaps, 9 moderate gaps, and 10 minor gaps. Here we consolidate the 5 critical gaps, each of 2177
which represents a showstopper for at least one major application domain. 2178
C1: Absence of Quantitative Soft-versus-Rigid Fragmentation Comparison. The 2179
central motivation for soft capture in active debris removal (Section 3.2) rests on the propo- 2180
sition that compliant mechanisms reduce fragmentation risk relative to rigid robotic arms. 2181
Qualitative evidence supports this argument: Arshad et al. Arshad et al. [2025] identified 2182
the “potential to generate fragments during the capturing phase” for rigid systems; Chen 2183
et al. Chen et al. [2024] concluded that “single contact-based caging is excessively risky for 2184
fast-tumbling targets”; and the RemoveDebris harpoon test demonstrated structural fail- 2185
ure of a carbon fibre boom at 20 m s−1 impact Aglietti et al. [2020]. The e.deorbit mission 2186
study computed peak joint torques of 195 N m for capture of an 8-tonne ENVISAT tumbling 2187
at 5 ◦s−1 Flores-Abad et al. [2014]. However, no published study provides a quantitative 2188
fragmentation probability as a function of contact compliance. The catastrophic fragmenta- 2189
tion threshold (10 J g−1 specific energy from the IMPACT model Johnson et al. [2001]) has 2190
never been applied to a soft-versus-rigid capture force comparison. The fragmentation risk 2191
is physically plausible and supported by qualitative assessments—particularly for degraded 2192
appendages (solar panels, thermal blankets, antennas) that may have lost 30–60% of their 2193
original strength through decades of space environment exposure—but remains experimen- 2194
tally unquantified. This survey adopts the precautionary principle that compliant capture 2195
is preferred until quantitative data become available, on the basis that the consequences of 2196
inadvertent fragmentation are severe enough to warrant risk-averse technology selection. We 2197
propose this as the single highest-priority experimental investigation the community should 2198
undertake, requiring hypervelocity and low-velocity impact testing with debris surrogates at 2199
varying contact compliance levels. 2200
C2: No Soft Robotic Capture System Has Flown in Space. Despite eight distinct 2201
soft or compliant capture approaches documented in Section 3.2—gecko adhesive (TRL 4– 2202
5), DEMES grippers (TRL 3–4), bistable soft grippers (TRL 2–3), cryogenic metallic cable 2203
robots (TRL 3), inflatable origami arms (TRL 3), flytrap origami (TRL 2–3), thermally 2204
qualified multi-layer grippers (TRL 2), and the INSIDeR system concept (TRL ∼4)—none 2205
has flown. The gecko adhesive gripper of Jiang et al. Jiang et al. [2017] achieved microgravity 2206
validation with 100% capture success rate on spherical targets and capacity exceeding 400 kg, 2207
making it the most mature candidate. However, this gripper operates on a rigid robotic arm 2208
platform and is more accurately classified as a compliant end-effector on a conventional 2209
manipulator (Section 3.1). The gap between ground/parabolic-flight demonstration and or- 2210
bital flight requires addressing space environment qualification (vacuum outgassing, thermal 2211
cycling, radiation exposure over mission-duration timescales) for which limited data exist. 2212
C3: Rigid-to-Flexible Assembly Interface Lacks Specific Published Research. 2213
Section 12.3 identified that no published work specifically addresses distributed rigid-module 2214
attachment to inflatable membranes in the space environment, though adjacent work in 2215
tensegrity structures Skelton and de Oliveira [2009], Sabelhaus et al. [2015], deployable an- 2216
tenna feed supports Santiago-Prowald and Rodrigues [2018], and solar sail boom-membrane 2217
attachments Fernandez et al. [2014] provides relevant design heritage. All heritage dock- 2218
ing interfaces—ISS PDGF, Common Berthing Mechanism, ClearSpace-1 capture arms, and 2219
the androgynous interfaces reviewed by Liu et al. Liu et al. [2024]—assume rigid-to-rigid 2220
mating. At the 100-metre scale required for large inflatable debris shields (Section 11.3) or 2221
solar power platforms, the inflatable structure becomes a platform onto which functional 2222
modules must be assembled in orbit Nair et al. [2024], Li et al. [2022c]. The reaction force 2223
problem—how to apply assembly torques to a membrane that deforms under the applied 2224
load—has no published solution specific to the space inflatable context. Embedded metallic 2225
hardpoint rings represent a plausible design concept informed by the tensegrity and antenna 2226
feed analogues, but require detailed finite element analysis of stress concentration at the 2227
rigid-flexible interface, none of which has been published. 2228
C4: No Published AOCS Theory for Pressure-Stabilized Inflatable Structures. 2229
The control-structure interaction literature reviewed in Section 11.1 addresses rigid trusses, 2230
mesh antennas, and mechanically stiffened deployable arrays—structures with inherent stiff- 2231
ness independent of pressurization. Pressure-stabilized inflatable structures exhibit funda- 2232
mentally different dynamics: stiffness is a function of inflation pressure (a time-varying pa- 2233
rameter), membranes wrinkle under compression introducing piecewise-linear stiffness non- 2234
linearity, fabric is anisotropic, and internal gas couples to structural modes D’Eleuterio 2235
and Hughes [1984], Jenkins [2001]. The D’Eleuterio–Hughes gyroelastic body framework 2236
D’Eleuterio and Hughes [1984, 1986, 1987] provides the most promising theoretical founda- 2237
tion, but requires four extensions: (i) pressure-dependent constitutive model for membrane 2238
elements, (ii) wrinkling constraints reflecting piecewise-linear stiffness transitions, (iii) or- 2239
thotropic fabric constitutive laws, and (iv) gas-structure coupling for internal atmosphere 2240
dynamics. Each extension constitutes a substantial theoretical undertaking; collectively they 2241
define a research programme of 10–15 years. 2242
C5: Inflatable-Power Integration Gap. The PowerSphere programme (Section 9.2) 2243
demonstrated thin-film photovoltaic integration with an inflatable substrate using amor- 2244
phous silicon cells, achieving 7.25 W kg−1 at 10% cell efficiency Cadogan et al. [2006b]. The 2245
programme has been inactive since approximately 2009, and no successor has been identified. 2246
Meanwhile, perovskite/CIGS tandem cells have achieved 2100 W kg−1 with 25 µm substrates 2247
and greater than 85% power retention after more than 50 years of LEO-equivalent proton irra- 2248
diation Lang et al. [2020]. The technology exists to revive inflatable-integrated photovoltaics 2249
at 20–300× the specific power of the original PowerSphere, yet no programme is pursuing 2250
this integration. The gap is institutional rather than technical: flexible PV researchers and 2251
inflatable structure researchers operate in separate communities with no overlap programme. 2252
13.2 Integration Challenges at System Level 2253
Beyond individual technology gaps, the fundamental barrier to flight-ready soft inflatable 2254
robotic systems is system integration. The preceding sections documented integration deficits 2255
across multiple interfaces: 2256
• Actuation–Structure: Vacuum-gap electrostatic actuators (Section 7.2) achieve >4 N 2257
force at 0.7 g mass Sîrbu et al. [2025] using thin-film polymer multilayer construction 2258
that is structurally analogous to inflatable membrane wall architectures—yet no study 2259
has attempted to laminate actuator layers into an inflatable arm liner. Similarly, the 2260
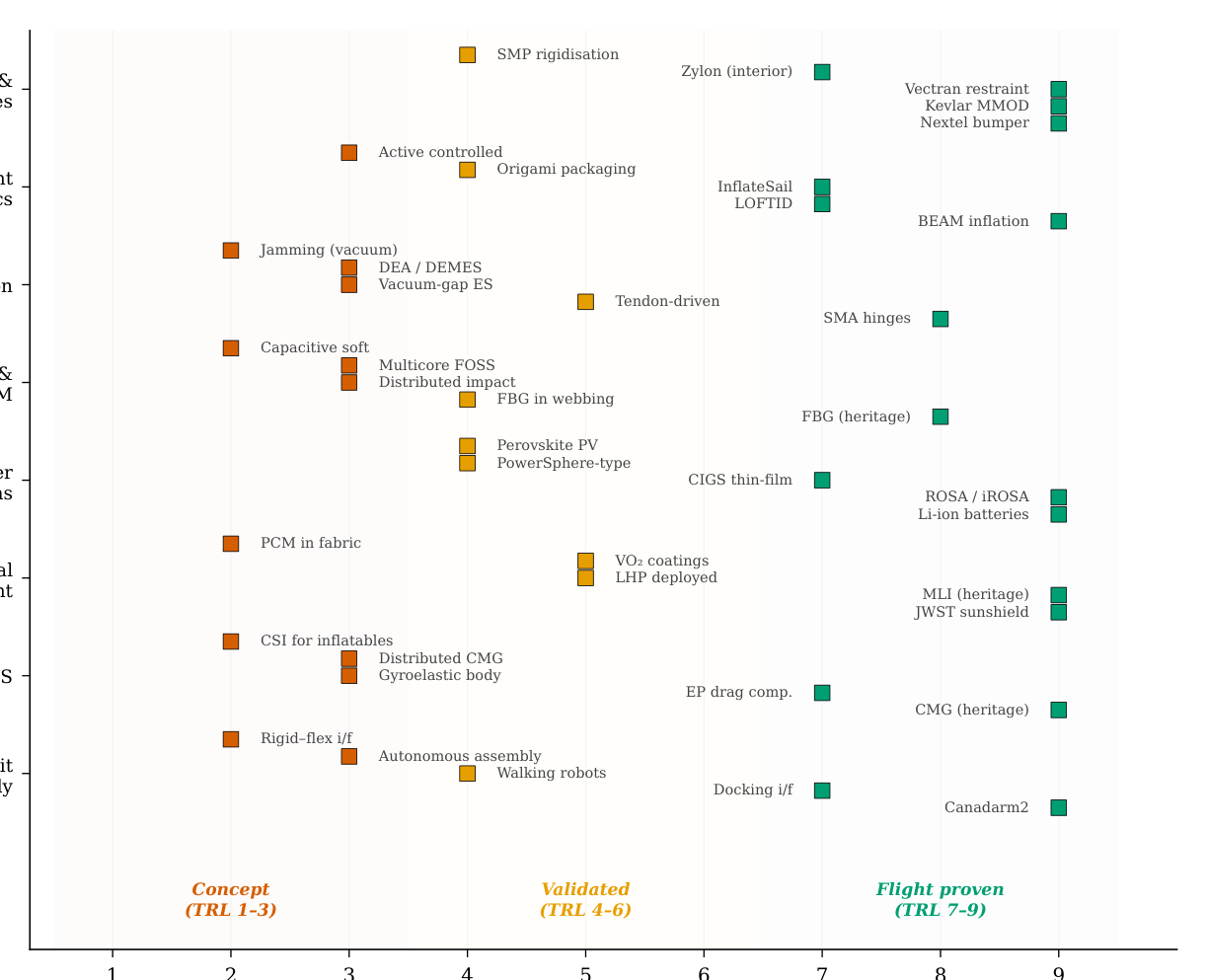
SMP rigidisation
Zylon (interior)
Materials &
Vectran restraint
Structures
Kevlar MMOD Nextel bumper
Active controlled
Origami packaging
Deployment
InflateSail
Mechanics
LOFTID
BEAM inflation
Jamming (vacuum)
DEA / DEMES Vacuum-gap ES
Actuation
Tendon-driven
SMA hinges
Capacitive soft
Multicore FOSS Distributed impact
Sensing &
SHM
FBG in webbing
FBG (heritage)
Perovskite PV PowerSphere-type
Power Systems
CIGS thin-film
ROSA / iROSA Li-ion batteries
PCM in fabric
VO₂ coatings LHP deployed
Thermal Management
MLI (heritage) JWST sunshield
CSI for inflatables
Distributed CMG Gyroelastic body
AOCS
EP drag comp.
CMG (heritage)
Rigid–flex i/f
Autonomous assembly
In-Orbit Assembly
Walking robots
Docking i/f
Canadarm2
Concept (TRL 1–3)
Validated (TRL 4–6)
Flight proven
(TRL 7–9)
1 2 3 4 5 6 7 8 9 Technology Readiness Level (TRL)
Figure 12: Technology readiness landscape across the eight enabling technology areas re- viewed in Sections 5–12. Each marker represents a specific sub-technology; colour indicates TRL band (red: concept TRL 1–3; orange: validated TRL 4–6; green: flight-proven TRL 7– 9). While heritage components (Vectran, FBG, ROSA, MLI, Canadarm2) have reached TRL 7–9, the integrative technologies required for soft inflatable robotic systems—vacuum- gap actuators, jamming in vacuum, rigid-to-flexible interfaces, distributed momentum man- agement, and PCM in fabric—remain at TRL 2–3.
jamming-in-vacuum concept (Section 7.6) has a sound physical basis Fitzgerald et al. 2261
[2020] but zero experimental validation in relevant conditions. 2262
• Sensing–Structure: FBG sensors woven into Vectran webbing have been demon- 2263
strated at NASA JSC on 0.61 m and 2.74 m test articles (TRL 4–5) Bally Ribbon 2264
Mills and Luna Innovations [2020], while multicore fibre optic shape sensing achieves 2265
0.64 mm position accuracy in soft actuators Galloway et al. [2019]. The same FBG 2266
technology could provide both structural health monitoring for inflatable walls and 2267
proprioceptive sensing for inflatable robotic arms—a unified sensing architecture that 2268
has not been proposed or demonstrated. 2269
• Power–Thermal–Structure: A large inflatable membrane with thin-film PV on the 2270
sun-facing surface, MLI on the space-facing surface, and variable-emissivity coatings 2271
for thermal regulation represents a multi-functional surface that would merge the power 2272
and thermal subsystems into a single membrane layer. The PowerSphere concept ap- 2273
proached this integration using 2004-era materials Cadogan et al. [2006b]; 2025-era 2274
perovskite/CIGS cells on Kapton or Mylar substrates would share the same polymer 2275
base as inflatable MLI layers Lang et al. [2020], making the integration pathway plau- 2276
sible. 2277
• AOCS–Deployment: BEAM’s deployment anomaly (25 inflation bursts over 7 hours; 2278
Section 6.3) illustrates that deployment is a dynamic event with angular momen- 2279
tum consequences. For a free-flying 100-metre inflatable, each inflation pulse imparts 2280
momentum to the structure, and as the structure changes shape during deployment 2281
its modal frequencies shift—potentially crossing into the AOCS controller bandwidth 2282
D’Eleuterio and Hughes [1984]. No published work addresses the coupled deployment– 2283
AOCS problem for inflatables. 2284
• Drag–Power–Thermal Cascade: At 500 km altitude, a 100-metre broadside inflat- 2285
able experiences drag forces of 0.17–2.2 N depending on solar activity, attitude, and 2286
drag coefficient (Section 11.3). To illustrate the cascade quantitatively, consider a 2287
worked example for the solar-minimum broadside case (FD = 0.174 N) and the solar- 2288
maximum broadside sensitivity case (FD = 2.19 N): 2289
Step 1 — Thrust: Hall thruster at Isp = 3,000 s, exhaust velocity ve = g0Isp = 2290
29,430 m/s. 2291
Step 2 — Power: Pthrust = FDve/(2η) where η = 0.6. Solar-min broadside: P = 0.174× 2292
29,430/1.2 = 4.3 kW. Solar-max broadside sensitivity case: P = 2.19 × 29,430/1.2 = 2293
54 kW. 2294
Step 3 — Solar array: At 300 W m−2 (BOL, triple-junction) and 100 W kg−1 system- 2295
level specific power: solar-min requires 14 m2 / 43 kg; solar-max requires 180 m2 / 2296
540 kg—a major but not prohibitive subsystem allocation. 2297
Step 4 — Waste heat: At 40% combined losses (thruster + PPU): solar-min generates 2298
1.7 kW waste; solar-max generates 21 kW waste. 2299
Step 5 — Radiator: At 200 W m−2 radiator capacity: solar-min requires 9 m2; solar- 2300
max requires 110 m2. 2301
This cascade demonstrates that the solar-maximum broadside scenario is challenging 2302
without active attitude control to reduce Aeff, confirming that drag budget and AOCS 2303
capability are inextricably coupled. Edge-on operation at solar minimum (0.0035 N 2304
drag, ∼0.085 kW power, <1 m2 array) is feasible; other scenarios require either active 2305
attitude management, altitude selection, or both. No published analysis traces this full 2306
cascade end-to-end for inflatable platforms, and a complete parametric study spanning 2307
altitude, solar cycle, attitude strategy, and propulsion technology is identified as a 2308
future research need. 2309
A unifying observation emerges: the integration barriers are not gaps within individual 2310
technology disciplines but gaps between disciplines. The soft robotics community, the inflat- 2311
able structures community, the space power community, and the GNC community each have 2312
mature capabilities; the intersections remain unexplored. This fragmentation of the research 2313
landscape is itself a structural challenge that programmatic measures (cross-disciplinary 2314
funding calls, joint ground demonstrators) must address. 2315
13.3 Proposed Research Roadmap: 5-Year and 15-Year Horizons 2316
Based on the gap analysis above and the technology readiness levels documented in Sec- 2317
tions 5–12, we propose a two-horizon research roadmap. The 5-year horizon (2026–2031) 2318
targets ground validation and component-level flight demonstration; the 15-year horizon 2319
(2026–2041) targets system-level flight demonstration and initial operational capability. 2320
5-Year Horizon (2026–2031). Five priority activities are identified, each addressing one 2321
or more critical or moderate gaps: 2322
1. Jamming-in-vacuum experimental validation (addresses M1). Ground experi- 2323
ment: vacuum chamber with sealed granular/layer jamming specimen connected to a 2324
pressurized chamber simulating an inflatable interior. Measure stiffness ratio versus 2325
pressure differential and compare to terrestrial baselines. Space-compatible granular 2326
media candidates include hollow glass microspheres and metallic powder. This ex- 2327
periment is well-defined, moderate-cost, and publishable regardless of outcome. If 2328
successful, it validates variable-stiffness robotic elements that are simpler in orbit than 2329
on Earth—a paradigm inversion for soft space robotics. 2330
2. FBG-in-Vectran-webbing flight demonstration (addresses M6). Current ground 2331
demonstrations at NASA JSC Bally Ribbon Mills and Luna Innovations [2020] have 2332
reached TRL 4–5. The next step is a flight experiment on an ISS external payload 2333
platform (e.g., MISSE or Bartlett) exposing FBG-instrumented Vectran webbing to the 2334
LEO environment (atomic oxygen, UV, thermal cycling, MMOD) for 12–24 months. 2335
Success would advance the technology to TRL 6–7 and establish the flight heritage 2336
base for inflatable SHM. 2337
3. Perovskite/CIGS fold-deploy-power testing (addresses C5, M5). Deposit per- 2338
ovskite/CIGS tandem cells on 25 µm polymer substrates identical to those used for 2339
inflatable MLI. Subject samples to 1000 fold/deploy mechanical cycles, 1000 thermal 2340
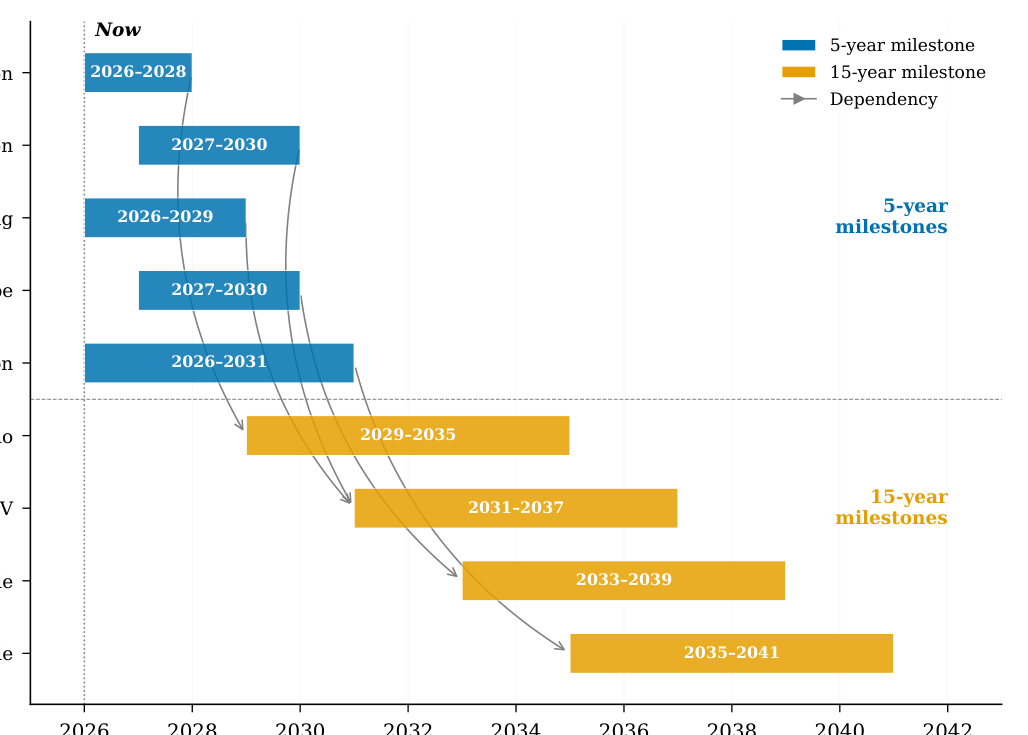
Now
5-year milestone
15-year milestone
2026–2028
Jamming-in-vacuum validation
Dependency
2027–2030
FBG flight demonstration
5-year milestones
2026–2029
Perovskite fold-deploy testing
2027–2030
Rigid–flexible interface prototype
2026–2031
Gyroelastic theory extension
2029–2035
Soft gripper flight demo
15-year milestones
2031–2037
10 m inflatable with PV
2033–2039
Assembly robot on inflatable
2035–2041
AOCS-qualified inflatable
2026 2028 2030 2032 2034 2036 2038 2040 2042 Year
Figure 13: Research roadmap for soft inflatable robotic space systems spanning 5-year and 15-year horizons. Near-term milestones focus on ground validation of critical unknowns (jamming-in-vacuum, FBG flight, perovskite fold-deploy, rigid-flexible interface); long-term milestones target integrated flight demonstrations (soft gripper capture, 10 m inflatable with PV, assembly robot on inflatable substrate, AOCS-qualified inflatable).
vacuum cycles (−100 ◦C to 120 ◦C), and atomic oxygen exposure at LEO-equivalent 2341
fluences. Measure power output degradation after each environmental stress. This 2342
establishes whether the remarkable radiation hardness of perovskite/CIGS Lang et al. 2343
[2020] survives the additional mechanical and environmental stresses of inflatable in- 2344
tegration. 2345
4. Rigid-to-flexible interface ground prototype (addresses C3). Design, fabricate, 2346
and test embedded metallic load-spreader rings sewn into representative multi-layer 2347
inflatable fabric during manufacture. Characterize load distribution, stress concentra- 2348
tion factors, and modal response under simulated assembly loading. Compare FEA 2349
predictions with experimental measurements. This ground programme would produce 2350
the first published dataset on rigid-to-flexible assembly interfaces for space inflatables. 2351
5. Gyroelastic theory extension for pressure-stabilized membranes (addresses 2352
C4). Mathematical extension of the D’Eleuterio–Hughes framework D’Eleuterio and 2353
Hughes [1984, 1986] incorporating pressure-dependent stiffness and fabric orthotropy. 2354
Numerical validation against commercial FEM codes for representative inflatable ge- 2355
ometries (cylinder, torus, sphere). Publication of the extended theory would establish 2356
the foundational AOCS framework that any 100-metre-class inflatable mission will 2357
require. 2358
15-Year Horizon (2026–2041). Four system-level demonstrations define the long-term 2359
roadmap: 2360
1. Soft gripper flight for debris capture (addresses C1, C2). A CubeSat or small- 2361
satellite class mission demonstrating compliant capture of a cooperative (then non- 2362
cooperative) target in LEO. The gripper subsystem (gecko adhesive, DEMES, or suc- 2363
cessor technology) operates on an inflatable arm with integrated FBG sensing. This 2364
mission provides the first orbital data on soft capture dynamics and validates the frag- 2365
mentation risk reduction argument with flight telemetry. 2366
2. 10-metre inflatable with integrated photovoltaics (addresses C5). A free-flying 2367
technology demonstrator deploying a 10-metre-class inflatable membrane with lami- 2368
nated perovskite/CIGS cells, demonstrating fold/deploy survival and power generation 2369
in the orbital environment. This bridges the gap between ROSA-class rigid-boom flex- 2370
ible arrays (TRL 9) and the 100-metre inflatable solar platforms envisioned for future 2371
missions. 2372
3. Assembly robot on inflatable substrate (addresses C3). A ground or parabolic- 2373
flight demonstration of a walking or crawling robot (E-Walker class Nair et al. [2024]) 2374
operating on an inflatable test article, attaching and detaching rigid modules via em- 2375
bedded hardpoint interfaces. This validates the rigid-to-flexible assembly concept in 2376
representative (reduced) gravity conditions. 2377
4. AOCS-qualified pressure-stabilized inflatable (addresses C4). A free-flying in- 2378
flatable structure (3–10 metre scale) with onboard AOCS demonstrating three-axis at- 2379
titude control of a pressure-stabilized membrane in LEO. This validates the extended 2380
gyroelastic theory and provides the first flight data on control-structure interaction for 2381
inflatable spacecraft. 2382
Drag–Power–Thermal Cascade for 100 m Inflatable at 500 km
P = F·ve/2η
ηEP ≈ 100%
(η = 60%) PSA = 300 W/m2 ηwaste ≈ 60%
Solar Array
EP Thrust
Electrical
Thermal Waste
Best case (solar min,
Drag Force
Required
Power
Heat
Area
edge-on)
3.3 m2
0.35 N
0.35 N
1.0 kW
0.6 kW
Radiator
Area
0.2 m2
Solar Array
EP Thrust
Electrical
Thermal Waste
Worst case (solar max,
Drag Force
Required
Power
Heat
Area
broadside)
165+ m2
21 N
21 N
50+ kW
30+ kW
Radiator
Area
10+ m2
Figure 14: Drag-power-thermal cascade analysis for a 100 m-class inflatable structure in LEO, illustrating how atmospheric drag drives propulsion power requirements, which in turn drive solar array sizing and thermal dissipation budgets. The cascade quantifies the interdependence of the AOCS, power, and thermal subsystems.
13.4 The Path to Flight Demonstration 2383
Among the roadmap milestones, the most flight-ready near-term demonstrator can be iden- 2384
tified by selecting the highest-TRL components from each technology area and integrating 2385
them into a single mission concept. The analysis in Sections 5–8 suggests the following 2386
combination: 2387
• Capture mechanism: Gecko adhesive gripper (TRL 4–5, microgravity validated, 2388
400 kg capacity) Jiang et al. [2017], noting that this is a compliant end-effector on a 2389
conventional arm rather than a fully soft system. 2390
• Arm structure: Inflatable multi-link arm based on the POPUP concept (TRL 3) 2391
Palmieri et al. [2023], using Vectran fabric links with FBG-instrumented webbing. 2392
• Structural health monitoring: FBG sensors in Vectran webbing (TRL 4–5 ground) 2393
Bally Ribbon Mills and Luna Innovations [2020], providing both SHM and propriocep- 2394
tive shape sensing via multicore FOSS principles Galloway et al. [2019]. 2395
• Deployment: SMA-based hinge deployment for arm segments (TRL 8–9) Costanza 2396
and Tata [2020]. 2397
This combination achieves an estimated system TRL of 3–4, limited by the inflatable 2398
arm structure. A CubeSat-class (12U–16U) demonstrator could validate the complete soft 2399
capture concept—deploy inflatable arm, acquire cooperative target, demonstrate FBG-based 2400
shape sensing during capture—within a 3–5 year development timeline from programme ini- 2401
tiation. The mission would produce the first orbital dataset on: (i) inflatable arm deployment 2402
dynamics, (ii) FBG sensor performance in the LEO environment on a flexible structure, and 2403
(iii) compliant capture contact dynamics. These three datasets address critical gaps C2, M6, 2404
and partially C1, making this demonstrator the highest-value single mission for advancing 2405
the field. 2406
The key technical risk is the inflatable arm structure: POPUP-class arms have been 2407
demonstrated only in simulation Palmieri et al. [2023], and the transition from analytical 2408
design to space-qualified flight hardware requires a focused engineering programme. However, 2409
the constituent technologies—Vectran fabric, SMA deployment mechanisms, FBG sensors— 2410
each have independent space heritage that de-risks the integration challenge. 2411
A critical observation from the roadmap analysis is that the fragmentation paradox (Sec- 2412
tion 3.1) will not be resolved by the flight demonstrator alone. The proposed CubeSat mission 2413
validates soft capture mechanics but does not generate fragmentation data. Resolving gap 2414
C1 requires a parallel ground campaign: hypervelocity and low-velocity impact testing with 2415
debris surrogate materials (solar panel fragments, aluminium honeycomb, carbon fibre com- 2416
posite) at representative contact forces, comparing rigid grasp, compliant grasp, and soft 2417
envelopment capture modes. Parabolic flight campaigns can provide microgravity validation 2418
of the ground results. Together, the flight demonstrator and the ground fragmentation study 2419
would establish the quantitative evidence base that the soft ADR proposition currently lacks. 2420
14 Conclusions 2421
This survey has reviewed the state of the art in soft inflatable robotic systems for space 2422
applications, covering eight enabling technology areas across 14 sections and synthesizing 2423
findings from the active debris removal, space exploration, and robotic assembly domains. 2424
Four key findings emerge from this comprehensive analysis. 2425
Finding 1: The Fragmentation Paradox Demands Soft Capture Solutions. The 2426
space debris environment has reached a critical state: over 54,000 tracked objects larger than 2427
10 cm, an estimated 140 million fragments between 1 mm and 1 cm, and a total orbital mass 2428
exceeding 15,800 tonnes ESA Space Debris Office [2025]. Active debris removal at the rate of 2429
at least 5 large objects per year is required to stabilize the LEO population Liou et al. [2010]. 2430
Yet the dominant ADR approach—rigid robotic capture, as exemplified by ClearSpace-1— 2431
carries an unquantified but non-trivial fragmentation risk for tumbling targets (Section 3.1). 2432
Rigid capture of a debris object could generate new fragments, potentially exacerbating the 2433
very problem it aims to solve. Soft and compliant capture mechanisms (Section 3.2), by ab- 2434
sorbing kinetic energy rather than transmitting contact impulses, offer a system-level safety 2435
margin that rigid capture cannot provide. The absence of a quantitative soft-versus-rigid 2436
fragmentation comparison (gap C1) is the single most important open research question 2437
identified by this survey. Until this comparison is performed, the ADR community is select- 2438
ing capture mechanisms without the fundamental dataset needed for informed technology 2439
selection. 2440
Finding 2: Inflatable Habitats Are Flight-Proven, with a Clear Path to Deep- 2441
Space Application. BEAM’s 8+ years of continuous operation on the International Space 2442
Station has conclusively demonstrated that pressure-stabilized inflatable modules can sur- 2443
vive the LEO environment at TRL 9 (Section 4.1). The mass efficiency advantage is decisive: 2444
39 kg m−3 for TransHab versus 137–205 kg m−3 for metallic ISS modules Valle et al. [2019a]. 2445
Vectran-based restraint layers provide specific strengths exceeding 2300 kN m kg−1, an or- 2446
der of magnitude beyond aerospace metals (Section 5.1). Current commercial programmes 2447
(Sierra Space LIFE) have demonstrated full-scale burst pressures of 77 psi, exceeding NASA 2448
structural requirements by 27% (Section 4.2). The path from BEAM to deep-space habitats 2449
requires addressing three challenges: radiation shielding (BEAM’s 8–10× higher SPE dose 2450
versus metallic modules; Section 4.4), autonomous deployment reliability (BEAM’s 25-burst, 2451
7-hour deployment was rescued by ISS crew; Section 6.3), and the 19× volume scale-up from 2452
BEAM’s 16 m3 to a 300+ m3 deep-space transit habitat. Each challenge is substantive but 2453
bounded, with identified mitigation strategies (water-wall radiation shielding, deployment 2454
sequencing control, and multi-layer restraint engineering, respectively). 2455
Finding 3: The Space Vacuum Is a Resource, Not Merely an Obstacle. The tra- 2456
ditional framing of the space environment as hostile to soft robotics—pneumatic actuation 2457
loses its working medium, elastomers outgas, lubricants evaporate—is being overturned by 2458
three developments. First, vacuum-gap electrostatic actuators Sîrbu et al. [2025] achieve 2459
>4 N force at 0.7 g mass with >100 Hz bandwidth by using internal vacuum gaps as func- 2460
tional elements; these actuators require vacuum and are simpler in orbit than on Earth 2461
(Section 7.2). Second, the jamming-in-vacuum principle exploits the ambient orbital vac- 2462
uum as the external low-pressure reservoir for granular or layer jamming, eliminating the 2463
vacuum pump required in terrestrial implementations (Section 7.6); this remains a logical 2464
deduction requiring experimental validation (gap M1), but the physics is straightforward. 2465
Third, the very existence of pressure-stabilized inflatable structures depends on the vacuum 2466
environment providing the pressure differential that creates structural stiffness. Together, 2467
these observations suggest that soft inflatable robotic systems for space constitute a distinct 2468
engineering discipline—not merely terrestrial soft robotics adapted for space, but a field 2469
where the space environment enables capabilities impossible on Earth. 2470
Finding 4: The Critical Barrier Is System Integration, Not Individual Technol- 2471
ogy Maturity. Perhaps the most significant finding of this survey is negative: no single 2472
technology gap is a showstopper for the field. Vectran and Kevlar are flight-proven for inflat- 2473
able structures (TRL 9). SMA deployment mechanisms are flight-proven (TRL 8–9). FBG 2474
sensors have flown on Proba-2 (TRL 7–8). iROSA-class flexible photovoltaics power the 2475
ISS (TRL 9). Loop heat pipes transport multi-kilowatt thermal loads (TRL 9). Reaction 2476
wheels provide attitude control for the largest operational spacecraft (TRL 9). The barrier 2477
is at the interfaces: no programme has integrated FBG sensors into an inflatable structure 2478
for flight; no programme is developing photovoltaics on inflatable substrates; no theory ad- 2479
dresses AOCS for pressure-stabilized membranes; no interface enables rigid module assembly 2480
onto flexible platforms. The field suffers from a fragmentation of its own—not of debris, but 2481
of research communities. Soft roboticists, inflatable structure engineers, space power spe- 2482
cialists, and GNC researchers each advance their disciplines without the cross-disciplinary 2483
programmes needed to integrate their outputs into flight-ready systems. 2484
This survey has attempted to bridge that fragmentation by reviewing all eight enabling 2485
technology areas through a single lens: the unifying thesis that the same high-strength fabric 2486
technologies (Vectran, Kevlar, Nextel) serve both active debris removal and space exploration 2487
applications. The cross-domain connections identified throughout—thermal management 2488
informing actuator design (Section 10), MMOD protection materials serving as actuation 2489
substrates (Section 5), FBG sensing unifying habitat SHM and robotic proprioception (Sec- 2490
tion 8.1), and the drag–power–thermal cascade governing 100-metre-class platform architec- 2491
ture (Section 11.3)—are insights that emerge only from the breadth of an integrative review. 2492
They cannot be seen from within any single technology discipline. 2493
The research roadmap proposed in Section 13.3 identifies concrete near-term actions: 2494
jamming-in-vacuum validation, FBG flight demonstration on inflatable webbing, perovskite/CIGS 2495
fold-deploy testing, rigid-flexible interface prototyping, and gyroelastic theory extension. The 2496
most flight-ready integrated demonstrator—a gecko-adhesive gripper on an inflatable arm 2497
with FBG structural health monitoring—could fly within 3–5 years of programme initia- 2498
tion, generating the first orbital dataset on soft inflatable robotic capture. The longer-term 2499
vision—a 10-metre inflatable with integrated photovoltaics, assembly robots operating on 2500
inflatable platforms, and AOCS-qualified pressure-stabilized structures—defines a 15-year 2501
trajectory toward operational capability. 2502
The space debris crisis demands action on a timescale shorter than the 15-year technology 2503
roadmap allows. ClearSpace-1 and its successors will fly rigid capture missions within this 2504
decade. The soft robotics and inflatable structures communities must move from component- 2505
level demonstration to system-level integration with urgency commensurate with the prob- 2506
lem. The technologies exist; the integration does not. Closing the integration gaps identified 2507
in this survey is the defining challenge for the next generation of space robotics research. 2508
References 2509
ESA Space Debris Office. ESA space environment report 2025. Technical report, European 2510
Space Agency, 2025. URL https://www.esa.int/Space_Safety/Space_Debris. 2511
Donald J. Kessler and Burton G. Cour-Palais. Collision frequency of artificial satellites: 2512
The creation of a debris belt. Journal of Geophysical Research, 83(A6):2637–2646, 1978. 2513
doi:10.1029/JA083iA06p02637. URL https://doi.org/10.1029/JA083iA06p02637. 2514
Jer-Chyi Liou and Nicholas L. Johnson. Risks in space from orbiting debris. Science, 311 2515
(5759):340–341, 2006. doi:10.1126/science.1121337. URL https://doi.org/10.1126/ 2516
science.1121337. 2517
Jer-Chyi Liou and Nicholas L. Johnson. Instability of the present LEO satellite populations. 2518
Advances in Space Research, 41(7):1046–1053, 2008. doi:10.1016/j.asr.2007.04.081. URL 2519
https://doi.org/10.1016/j.asr.2007.04.081. 2520
Jer-Chyi Liou, Nicholas L. Johnson, and N. M. Hill. Controlling the growth of future 2521
LEO debris populations with active debris removal. Acta Astronautica, 66(5–6):648– 2522
653, 2010. doi:10.1016/j.actaastro.2009.08.005. URL https://doi.org/10.1016/j. 2523
actaastro.2009.08.005. 2524
Alexander Ledkov and Vladimir Aslanov. Review of contact and contactless active 2525
space debris removal approaches. Progress in Aerospace Sciences, 134:100858, 2022. 2526
doi:10.1016/j.paerosci.2022.100858. URL https://doi.org/10.1016/j.paerosci.2022. 2527
100858. 2528
Guglielmo S. Aglietti et al. The active space debris removal mission RemoveDe- 2529
bris: Part 2, in orbit operations. Acta Astronautica, 168:310–322, 2020. 2530
doi:10.1016/j.actaastro.2019.09.001. URL https://doi.org/10.1016/j.actaastro. 2531
2019.09.001. 2532
Gerald D. Valle et al. System integration comparison between inflatable and 2533
metallic spacecraft structures. In 2019 IEEE Aerospace Conference, pages 1–10, 2534
2019a. doi:10.1109/AERO.2019.8742000. URL https://doi.org/10.1109/AERO.2019. 2535
8742000. 2536
NASA Johnson Space Center. BEAM ISS year-one science results. Technical Report JSC- 2537
CN-39950, NASA, 2017. 2538
Angel Flores-Abad, Ou Ma, Khanh Pham, and Steve Ulrich. A review of space robotics 2539
technologies for on-orbit servicing. Progress in Aerospace Sciences, 68:1–26, 2014. 2540
doi:10.1016/j.paerosci.2014.03.002. URL https://doi.org/10.1016/j.paerosci.2014. 2541
03.002. 2542
Tomasz Rybus. Robotic manipulators for in-orbit servicing and active debris re- 2543
moval: Review and comparison. Progress in Aerospace Sciences, 151:101055, 2024. 2544
doi:10.1016/j.paerosci.2024.101055. URL https://doi.org/10.1016/j.paerosci.2024. 2545
101055. 2546
Yongchang Zhang, Pengchun Li, Jiale Quan, Longqiu Li, Guangyu Zhang, and Dehong 2547
Zhou. Progress, challenges, and prospects of soft robotics for space applications. Advanced 2548
Intelligent Systems, 5(3):2200071, 2023a. doi:10.1002/aisy.202200071. URL https://doi. 2549
org/10.1002/aisy.202200071. 2550
Ion-Dan Sîrbu, Andrea Mazzotta, Umberto Tosi, et al. Vacuum-gap electrostatic multilayer 2551
actuators for space robotics. Nature Communications, 16:11414, 2025. doi:10.1038/s41467- 2552
025-66232-7. URL https://doi.org/10.1038/s41467-025-66232-7. 2553
Siobhan G. Fitzgerald, Gareth W. Delaney, and David Howard. A review of jamming 2554
actuation in soft robotics. Actuators, 9(4):104, 2020. doi:10.3390/act9040104. URL 2555
https://doi.org/10.3390/act9040104. 2556
Oluwaseun A. Araromi, Andrew T. Conn, Chen S. Ling, and Jonathan M. Rossiter. 2557
Rollable multisegment dielectric elastomer minimum energy structures for a deploy- 2558
able microsatellite gripper. IEEE/ASME Transactions on Mechatronics, 20(1):438– 2559
446, 2015. doi:10.1109/TMECH.2014.2329367. URL https://doi.org/10.1109/TMECH. 2560
2014.2329367. 2561
NASA. NASA Systems Engineering Processes and Requirements. NPR 7123.1B, 2020. 2562
Muneeb Arshad, Michael C. F. Bazzocchi, and Faraz Hussain. Emerging strategies in close 2563
proximity operations for space debris removal: A review. Acta Astronautica, 228:996– 2564
1022, 2025. doi:10.1016/j.actaastro.2024.12.017. URL https://doi.org/10.1016/j. 2565
actaastro.2024.12.017. 2566
Yan Chen et al. Space debris reliable capturing by a dual-arm orbital robot: Detumbling 2567
and caging. arXiv preprint arXiv:2405.00943, 2024. URL https://arxiv.org/abs/2405. 2568
00943. 2569
Hao Jiang et al. A robotic device using gecko-inspired adhesives can grasp 2570
and manipulate large objects in microgravity. Science Robotics, 2(7):eaan4545, 2571
2017. doi:10.1126/scirobotics.aan4545. URL https://doi.org/10.1126/scirobotics. 2572
aan4545. 2573
Paolo Palmieri, Mario Troise, Luca Salamina, Matteo Gaidano, Matteo Melchiorre, and 2574
Stefano Mauro. An inflatable 7-DOF space robotic arm for active debris removal. In 2575
Advances in Mechanism and Machine Science (IFToMM WC 2023), volume 148 of Mech- 2576
anisms and Machine Science. Springer, 2023. doi:10.1007/978-3-031-45770-8_58. URL 2577
https://doi.org/10.1007/978-3-031-45770-8_58. 2578
DuPont. Kevlar 49 Aramid Fiber Technical Data Sheet, 2019. 2579
Sierra Space Corporation. LIFE habitat ultimate burst pressure test results. Corporate press 2580
release, 2024. 2581
Kriss J. Kennedy. Lessons from TransHAB: An architect’s experience. In AIAA Space 2582
Architecture Symposium, number AIAA 2002-6105, 2002. doi:10.2514/6.2002-6105. URL 2583
https://doi.org/10.2514/6.2002-6105. 2584
Mingxin Wang, Qian Wang, Yakai Xiao, Mingliang Wang, Jianwei Wang, Haowei Wang, and 2585
Zhansheng Chen. Review of passive shielding materials for high-energy charged particles 2586
in Earth’s orbit. Materials, 18(11):2558, 2025. doi:10.3390/ma18112558. URL https: 2587
//doi.org/10.3390/ma18112558. 2588
Timothy L. Weadon. Long term loading properties of Vectran fabric for inflatable space 2589
habitats. Master’s thesis, West Virginia University, 2013. 2590
Roberto Destefanis et al. Enhanced space debris shields for manned spacecraft. International 2591
Journal of Impact Engineering, 29:217–228, 2003. doi:10.1016/j.ijimpeng.2003.09.019. 2592
URL https://doi.org/10.1016/j.ijimpeng.2003.09.019. 2593
Ji-Hun Cha, Jun-Sang Noh, S. K. Sathish Kumar, et al. Origami multi-layer space shield 2594
for cylindrical space structure. Chinese Journal of Aeronautics, 37(10):294–312, 2024. 2595
doi:10.1016/j.cja.2024.06.004. URL https://doi.org/10.1016/j.cja.2024.06.004. 2596
Douglas A. Litteken. Inflatable technology: Using flexible materials to make large space 2597
structures. In Proceedings of SPIE 10966, Earth and Space 2018, volume 10966, 2019. 2598
doi:10.1117/12.2500091. URL https://doi.org/10.1117/12.2500091. 2599
Koryo Miura. Method of packaging and deployment of large membranes in space. Technical 2600
Report 618, Institute of Space and Astronautical Science, 1985. 2601
Mark Schenk, Andrew D. Viquerat, Keith A. Seffen, and Simon D. Guest. Review of 2602
inflatable booms for deployable space structures: Packing and rigidization. Journal 2603
of Spacecraft and Rockets, 51(3):762–778, 2014. doi:10.2514/1.A32598. URL https: 2604
//doi.org/10.2514/1.A32598. 2605
Felix Lang et al. Proton radiation hardness of perovskite tandem photovoltaics. Joule, 4 2606
(5):1054–1069, 2020. doi:10.1016/j.joule.2020.03.006. URL https://doi.org/10.1016/ 2607
j.joule.2020.03.006. 2608
William Foster-Hall, David J. Harvey, Ling Yin, and Rini Akmeliawati. Soft robotics 2609
for space applications: Cryogenic performance of modular metallic cable structures. 2610
Soft Robotics, 2025. doi:10.1177/21695172251364758. URL https://doi.org/10.1177/ 2611
21695172251364758. 2612
Wei Zhang, Feng Li, Junlin Li, and Qinkun Cheng. Review of on-orbit 2613
robotic arm active debris capture removal methods. Aerospace, 10(1):13, 2023b. 2614
doi:10.3390/aerospace10010013. URL https://doi.org/10.3390/aerospace10010013. 2615
Andrea Stolfi, Paolo Gasbarri, and Marco Sabatini. A combined impedance–PD approach 2616
for controlling a dual-arm space manipulator in the capture of a non-cooperative target. 2617
Acta Astronautica, 139:243–253, 2017. doi:10.1016/j.actaastro.2017.07.014. URL https: 2618
//doi.org/10.1016/j.actaastro.2017.07.014. 2619
Aerospace Corporation. IMPACT satellite breakup model. Technical report, The Aerospace 2620
Corporation, 2020. 2621
ClearSpace SA and European Space Agency. ClearSpace-1: ESA’s first space debris re- 2622
moval mission. https://www.esa.int/Space_Safety/ClearSpace-1, 2020. ClearSpace- 2623
1 Phase B2/C/D contract. 2624
Nicholas L. Johnson, Paula H. Krisko, J.-C. Liou, and Phillip D. Anz-Meador. NASA’s 2625
new breakup model of EVOLVE 4.0. Advances in Space Research, 28(9):1377–1384, 2001. 2626
doi:10.1016/S0273-1177(01)00423-9. URL https://doi.org/10.1016/S0273-1177(01) 2627
00423-9. 2628
Jun Shintake, Vito Cacucciolo, Dario Floreano, and Herbert Shea. Soft robotic grippers. 2629
Advanced Materials, 30(29):1707035, 2018. doi:10.1002/adma.201707035. URL https: 2630
//doi.org/10.1002/adma.201707035. 2631
Yuhang Liu, Kai Luo, Shuai Wang, Xiaodong Song, Zhijuan Zhang, Qiang Tian, and Haiyan 2632
Hu. A soft and bistable gripper with adjustable energy barrier for fast capture in space. 2633
Soft Robotics, 10(1):77–87, 2023. doi:10.1089/soro.2021.0147. URL https://doi.org/ 2634
10.1089/soro.2021.0147. 2635
Yongchang Zhang, Jiale Quan, Pengchun Li, Wenping Song, Guangyu Zhang, Longqiu Li, 2636
and Dekai Zhou. A flytrap-inspired bistable origami-based gripper for rapid active debris 2637
removal. Advanced Intelligent Systems, 5(7):2200468, 2023c. doi:10.1002/aisy.202200468. 2638
URL https://doi.org/10.1002/aisy.202200468. 2639
Fernando Ruiz Vincuería, Begoña C. Arrue, and Aníbal Ollero. Thermally-resilient soft 2640
gripper for on-orbit operations. In 2024 IEEE/RSJ International Conference on Intelligent 2641
Robots and Systems (IROS), 2024. doi:10.1109/iros58592.2024.10801537. URL https: 2642
//doi.org/10.1109/iros58592.2024.10801537. arXiv:2311.08942. 2643
CT Ingénierie, AirCaptif, and CNES. INSIDeR: Innovative Net and Space Inflatable struc- 2644
ture for active Debris Removal. In Proceedings of the 7th European Conference on Space 2645
Debris (SDC7), number Paper 714. ESA, 2017. 2646
CT Ingénierie, AirCaptif, CNES, and ESA. INSIDeR: Ground demonstrator development 2647
and net capture simulations. In Proceedings of the 8th European Conference on Space 2648
Debris (SDC8), number Paper 91. ESA, 2021. 2649
Eric L. Christiansen. Handbook for designing MMOD protection. Technical Report 2650
NASA/TM-2009-214785, NASA, 2009. 2651
Roberto Destefanis, Frank Schaefer, Michel Lambert, and Michel Faraud. Selecting enhanced 2652
space debris shields for manned spacecraft. International Journal of Impact Engineering, 2653
33(1–12):219–230, 2006. doi:10.1016/j.ijimpeng.2006.09.065. URL https://doi.org/10. 2654
1016/j.ijimpeng.2006.09.065. 2655
NASA. NextSTEP-2 partners develop ground prototypes for deep space habitats. https: 2656
//www.nasa.gov/nextstep, 2016. 2657
Lockheed Martin. Bursting the bubble with inflatable habi- 2658
tats. https://www.lockheedmartin.com/en-us/news/features/2022/ 2659
bursting-the-bubble-with-inflatable-habitats.html, 2022. 2660
Hassell Studio and European Space Agency. Inflatable lunar habitat at Shackleton crater, 2661
2024. 2662
Skidmore, Owings & Merrill and European Space Agency. Moon village habitat concept, 2663
2019. 2664
European Space Agency. Pneumocell: Inflatable lunar habitat for regolith burial, 2018. 2665
NASA. LOFTID: Low-earth orbit flight test of an inflatable decelerator. https://www. 2666
nasa.gov/mission/loftid/, 2022. 2667
ESA/ESTEC. First European workshop on inflatable space structures, 2002. 2668
G. D. Valle, D. Litteken, and T. Jones. Review of habitable softgoods inflatable design, 2669
analysis, testing, and potential space applications. In AIAA SciTech 2019 Forum, 2019b. 2670
doi:10.2514/6.2019-1018. URL https://doi.org/10.2514/6.2019-1018. AIAA 2019- 2671
1528. 2672
R. Destefanis et al. Space environment characterisation of Kevlar. In ESA-ESTEC ISME-09, 2673
2009. 2674
Toyobo Co., Ltd. ZYLON (PBO fiber) technical information. Technical report, Toyobo Co., 2675
Ltd., 2005. 2676
M. A. Said, B. Dingwall, A. Gupta, A. M. Seyam, G. N. Mock, and T. Theyson. Investigation 2677
of ultra violet (UV) resistance for high performance fibers. Advances in Space Research, 2678
37(11):2052–2058, 2006. doi:10.1016/j.asr.2005.04.098. URL https://doi.org/10.1016/ 2679
j.asr.2005.04.098. 2680
E. Christiansen et al. Heat-cleaned Nextel in MMOD shielding. In NASA/JSC, 2019. NTRS 2681
20190033497. 2682
H. G. Pippin et al. Space environment durability of beta cloth in LDEF thermal blankets. 2683
In NASA Conference Publication, 1993. NTRS 19940026510. 2684
B. A. Banks, K. K. de Groh, and S. K. Miller. Low Earth orbital atomic oxygen interactions 2685
with materials. Technical report, NASA Glenn Research Center, 2004. NASA/TM-2004- 2686
213400. 2687
M. M. Finckenor and D. Dooling. Multilayer insulation material guidelines. Technical report, 2688
NASA Marshall Space Flight Center, 1999. NASA/TP-1999-209263. 2689
K. J. Kennedy. TransHab inflatable habitat case study. Technical report, NASA, 2016. 2690
NTRS 20160011581. 2691
Gerald D. Valle, Joshua Edgecombe, and Horacio de la Fuente. Damage toler- 2692
ance testing of a NASA TransHab derivative woven inflatable module. In 50th 2693
AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Con- 2694
ference, 2009. doi:10.2514/6.2009-2167. URL https://doi.org/10.2514/6.2009-2167. 2695
AIAA 2009-2167. 2696
D. G. Gilmore. Spacecraft Thermal Control Handbook, Volume I: Fundamental Technologies. 2697
The Aerospace Press, 2nd edition, 2002. doi:10.2514/4.989117. URL https://doi.org/ 2698
10.2514/4.989117. 2699
D. Cadogan and S. E. Scarborough. Rigidizable materials for use in gossamer space inflatable 2700
structures. In 42nd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and 2701
Materials Conference, 2001. doi:10.2514/6.2001-1417. URL https://doi.org/10.2514/ 2702
6.2001-1417. AIAA 2001-1417. 2703
Craig Underwood, Andrew D. Viquerat, Mark Schenk, Ben Taylor, Chiara Massimi- 2704
ani, Richard Duke, Brian Stewart, Simon Fellowes, Chris Bridges, Guglielmo Agli- 2705
etti, Ben Sanders, Davide Masutti, and Amandine Denis. InflateSail de-orbit flight 2706
demonstration results and follow-on drag-sail applications. Acta Astronautica, 162:344– 2707
358, 2019. doi:10.1016/j.actaastro.2019.05.054. URL https://doi.org/10.1016/j. 2708
actaastro.2019.05.054. 2709
V. Lappas et al. The InflateSail CubeSat mission: The first European demonstration of 2710
drag-sail de-orbiting. In 4S Symposium, 2017. 2711
R. E. Freeland et al. Recent advances in the rigidization of gossamer structures. In 45th 2712
AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Confer- 2713
ence, 2004. AIAA 2004-1561. 2714
R. Allred et al. UV rigidizable carbon-reinforced isogrid inflatable booms. In 43rd 2715
AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Confer- 2716
ence, 2002. AIAA 2002-1202. 2717
Adherent Technologies Inc. Rigidization on command (ROC) materials for inflatable space- 2718
craft. In SAE Technical Paper, 2001. 2001-01-2220. 2719
S. Patel et al. Rigidization analysis of SMA-based inflatable toroidal space struc- 2720
tures. Mechanics Based Design of Structures and Machines, 52(11):9334–9364, 2024. 2721
doi:10.1080/15397734.2024.2345375. URL https://doi.org/10.1080/15397734.2024. 2722
2345375. 2723
Ronen Verker, Eitan Keren, Noa Refaeli, Yoel Carmiel, Asaf Bolker, Dror David, 2724
Shai Katz, Erez Sagi, Doron Bashi, Ilan Finkelstein, Tuvia Nahum, Avigdor Haran, 2725
Asaf Shemesh Sadeh, Mordechai Ariel, Irina Gouzman, Odelya Amrani, Yonathan 2726
Simhony, and Matan Murat. Measurements of material erosion in space by atomic 2727
oxygen using the on-orbit material degradation detector. Acta Astronautica, 211:818– 2728
826, 2023. doi:10.1016/j.actaastro.2023.07.020. URL https://doi.org/10.1016/j. 2729
actaastro.2023.07.020. 2730
Ruiqiong Zhai, Xiaoning Yang, Lixiang Jiang, Hong Gao, Yuxin Zhang, and Zilong Jiao. 2731
Synergistic effects of atomic oxygen and thermal cycling in low earth orbit on polymer- 2732
matrixed space material. Heliyon, 9(8):e17431, 2023. doi:10.1016/j.heliyon.2023.e17431. 2733
URL https://doi.org/10.1016/j.heliyon.2023.e17431. 2734
M. Schenk and S. D. Guest. Inflatable cylinders for deployable space structures. In Proc. 2735
Transformables 2013, 2013. 2736
C. H. M. Jenkins. Gossamer Spacecraft: Membrane and Inflatable Structures Technology for 2737
Space Applications, volume 191 of Progress in Astronautics and Aeronautics. AIAA, 2001. 2738
A. C. Horn. A low cost inflatable CubeSat drag brake utilizing sublimation. Master’s thesis, 2739
Old Dominion University, 2017. 2740
D. P. Cadogan, S. E. Scarborough, J. K. Lin, and G. H. Sapna. PowerSphere multifunc- 2741
tional ultraviolet-rigidizable inflatable structures. Journal of Spacecraft and Rockets, 43 2742
(5), 2006a. doi:10.2514/1.3360. URL https://doi.org/10.2514/1.3360. 2743
Naifeng Li, Haijun Peng, and Fei Li. Instantaneous optimal control of inflatable folded 2744
structures. Acta Astronautica, 195:52–67, 2022a. doi:10.1016/j.actaastro.2022.02.024. URL 2745
https://doi.org/10.1016/j.actaastro.2022.02.024. 2746
S. J. Hughes et al. IRVE design overview. In 18th AIAA Aerodynamic Decelerator Systems 2747
Technology Conference, 2005. AIAA 2005-1636. 2748
Thomas W. Murphey, Jeremy A. Banik, and Sergio Pellegrino. TRAC boom technology. 2749
AIAA SciTech Forum, (AIAA 2015-0434), 2015. 2750
Jeremy A. Banik and Thomas W. Murphey. Performance validation of the triangular rollable 2751
and collapsible mast. In AIAA Structures, Structural Dynamics, and Materials Conference, 2752
number AIAA 2010-2585, 2010. 2753
C. Sickinger and L. Herbeck. Deployment strategies, analyses, and tests for the CFRP booms 2754
of a solar sail. In ESA SP-561, 2004. 2755
J. Santiago-Prowald and G. Rodrigues. Deployable antennas. In Handbook of Antenna 2756
Technologies. Springer, 2018. 2757
O. A. Araromi, I. Gavrilovich, J. Shintake, S. Rosset, M. Richard, V. Gass, and H. R. 2758
Shea. Towards a deployable satellite gripper based on multisegment dielectric elastomer 2759
minimum energy structures. In Proc. SPIE 9056, Electroactive Polymer Actuators and 2760
Devices (EAPAD) 2014, page 90562G, 2014. doi:10.1117/12.2044667. URL https:// 2761
doi.org/10.1117/12.2044667. 2762
Haopeng Liang, Yong Zhao, and Bingxiao Du. Design, fabrication and modeling of a 2763
dielectric elastomer tridimensional minimum energy structure for space mission. Sen- 2764
sors and Actuators A: Physical, 363:114747, 2023. doi:10.1016/j.sna.2023.114747. URL 2765
https://doi.org/10.1016/j.sna.2023.114747. 2766
A. Punning, K. J. Kim, V. Palmre, F. Vidal, C. Plesse, N. Festin, A. Maziz, K. Asaka, 2767
T. Sugino, G. Alici, et al. Ionic electroactive polymer artificial muscles in space applica- 2768
tions. Scientific Reports, 4:6913, 2014. doi:10.1038/srep06913. URL https://doi.org/ 2769
10.1038/srep06913. 2770
J. S. Mehling, M. A. Diftler, M. Chu, and M. Valvo. A minimally invasive ten- 2771
dril robot for in-space inspection. In First IEEE/RAS-EMBS International Con- 2772
ference on Biomedical Robotics and Biomechatronics (BioRob), pages 690–695, 2006. 2773
doi:10.1109/BIOROB.2006.1639170. URL https://doi.org/10.1109/BIOROB.2006. 2774
1639170. BioRob 2006. 2775
X. Ouyang, D. Meng, X. Wang, C. Wang, B. Liang, and N. Ding. Hybrid rigid-continuum 2776
dual-arm space robots: Modeling, coupling analysis, and coordinated motion planning. 2777
Aerospace Science and Technology, 116:106861, 2021. doi:10.1016/j.ast.2021.106861. URL 2778
https://doi.org/10.1016/j.ast.2021.106861. 2779
G. Costanza and M. E. Tata. Shape memory alloys for aerospace, recent developments, and 2780
new applications: A short review. Materials, 13(8), 2020. doi:10.3390/ma13081856. URL 2781
https://doi.org/10.3390/ma13081856. 2782
L. Blanc et al. Solar array root hinge based on shape memory alloy (SMA) actuator. In 2783
ESMATS, 2013. 2784
Y. Zhang, P. Li, J. Quan, L. Li, G. Zhang, and D. Zhou. Progress, challenges, and prospects 2785
of soft robotics for space applications. Advanced Intelligent Systems, 5(3):2200071, 2023d. 2786
doi:10.1002/aisy.202200071. URL https://doi.org/10.1002/aisy.202200071. 2787
Ahmad Ataka, Taqi Abrar, Fabrizio Putzu, Hareesh Godaba, and Kaspar Althoefer. Model- 2788
based pose control of inflatable eversion robot with variable stiffness. IEEE Robotics 2789
and Automation Letters, 5(2):3398–3405, 2020. doi:10.1109/LRA.2020.2976326. URL 2790
https://doi.org/10.1109/LRA.2020.2976326. 2791
Elliot W. Hawkes, Laura H. Blumenschein, Joseph D. Greer, and Allison M. Okamura. 2792
A soft robot that navigates its environment through growth. Science Robotics, 2(8), 2793
2017. doi:10.1126/scirobotics.aan3028. URL https://doi.org/10.1126/scirobotics. 2794
aan3028. 2795
Jianglong Guo, Jin-song Leng, and Jonathan M. Rossiter. Electroadhesion technologies for 2796
robotics: A comprehensive review. IEEE Transactions on Robotics, 36(2):313–327, 2020. 2797
doi:10.1109/TRO.2019.2956869. URL https://doi.org/10.1109/TRO.2019.2956869. 2798
Yoonho Kim, Hyunwoo Yuk, Ruike Zhao, Shawn A. Chester, and Xuanhe Zhao. Print- 2799
ing ferromagnetic domains for untethered fast-transforming soft materials. Nature, 2800
558:274–279, 2018. doi:10.1038/s41586-018-0185-0. URL https://doi.org/10.1038/ 2801
s41586-018-0185-0. 2802
I. McKenzie, N. Karafolas, H. Henschel, et al. Fiber optic sensing in spacecraft engineer- 2803
ing: An historical perspective from the European Space Agency. Frontiers in Physics, 2804
9:719441, 2021. doi:10.3389/fphy.2021.719441. URL https://doi.org/10.3389/fphy. 2805
2021.719441. 2806
Adriana Morana, Emmanuel Marin, Laurent Lablonde, Thomas Blanchet, Thierry Robin, 2807
Guy Cheymol, Guillaume Laffont, Aziz Boukenter, Youcef Ouerdane, and Sylvain Girard. 2808
Radiation effects on fiber Bragg gratings: Vulnerability and hardening studies. Sensors, 2809
22(21):8175, 2022. doi:10.3390/s22218175. URL https://doi.org/10.3390/s22218175. 2810
T. Baba, N. Saidin, N. F. Hasbullah, et al. Radiation tolerant fiber Bragg gratings: review 2811
of FBG sensing. Journal of Optics, 2025. doi:10.1007/s12596-025-02861-x. URL https: 2812
//doi.org/10.1007/s12596-025-02861-x. 2813
Bally Ribbon Mills and Luna Innovations. Inflatable space habitats use sensors embedded in 2814
webbing for structural health monitoring. Technical report, NASA SBIR Program, 2020. 2815
K. C. Galloway, Y. Chen, E. Templeton, B. Rife, I. S. Godage, and E. J. Barth. 2816
Fiber optic shape sensing for soft robotics. Soft Robotics, 6(5):671–684, 2019. 2817
doi:10.1089/soro.2018.0131. URL https://doi.org/10.1089/soro.2018.0131. 2818
Davide Paloschi, Kirill A. Bronnikov, Sanzhar Korganbayev, Alexey Wolf, Alexander Dos- 2819
tovalov, and Paola Saccomandi. 3D shape sensing with multicore optical fibers: Trans- 2820
formation matrices versus Frenet-Serret equations for real-time application. IEEE Sen- 2821
sors Journal, 21(4):4599–4609, 2021. doi:10.1109/JSEN.2020.3032480. URL https: 2822
//doi.org/10.1109/JSEN.2020.3032480. 2823
Shahriar Sefati, Cong Gao, Iulian Iordachita, Russell H. Taylor, and Mehran Ar- 2824
mand. Data-driven shape sensing of a surgical continuum manipulator using an un- 2825
calibrated fiber Bragg grating sensor. IEEE Sensors Journal, 21(3):3066–3076, 2021. 2826
doi:10.1109/JSEN.2020.3028208. URL https://doi.org/10.1109/JSEN.2020.3028208. 2827
Madhav Ramakrishnan, Ginu Rajan, Yuliya Semenova, and Gerald Farrell. Overview of 2828
fiber optic sensor technologies for strain/temperature sensing applications in composite 2829
materials. Sensors, 16(1):99, 2016. doi:10.3390/s16010099. URL https://doi.org/10. 2830
3390/s16010099. 2831
Amanda White, Isaac Little, Anastasiya Artyuk, Nicholas McKibben, Fereshteh Rajabi 2832
Kouchi, Claire Chen, David Estrada, and Zhangxian Deng. On-demand fabrication of 2833
piezoelectric sensors for in-space structural health monitoring. Smart Materials and Struc- 2834
tures, 33(5):055053, 2024. doi:10.1088/1361-665X/ad3d16. URL https://doi.org/10. 2835
1088/1361-665X/ad3d16. 2836
Pengfei Li, Suyu Xu, Chao Xu, Fei Du, and Shancheng Cao. Development of a miniature 2837
dynamic stiffness measurement prototype toward structural health monitoring of space 2838
inflatable structures. Measurement, 2022b. doi:10.1016/j.measurement.2022.111051. URL 2839
https://doi.org/10.1016/j.measurement.2022.111051. 2840
Brian R. Spence, Steven White, Michael LaPointe, Steven Kiefer, Paul LaCorte, Jeremy 2841
Banik, Darren Chapman, and Jay Merrill. International space station (ISS) roll-out so- 2842
lar array (ROSA) spaceflight experiment mission and results. In 2018 IEEE 7th World 2843
Conference on Photovoltaic Energy Conversion (WCPEC), pages 3522–3529. IEEE, 2018. 2844
doi:10.1109/PVSC.2018.8548030. URL https://doi.org/10.1109/PVSC.2018.8548030. 2845
Biao Yan, Li Qin, Siyuan Tao, and Guangqiang Fang. Development and challenges of large 2846
space flexible solar arrays. Space Solar Power and Wireless Transmission, 2(1):33–42, 2847
2025. doi:10.1016/j.sspwt.2025.03.004. URL https://doi.org/10.1016/j.sspwt.2025. 2848
03.004. 2849
Inyoung Jeong, Tae Kyung Lee, Hung Van Tran, Inchan Hwang, Kihwan Kim, et al. 2850
Flexible and lightweight perovskite/Cu(In,Ga)Se2 tandem solar cells. Joule, 9:101794, 2851
2024. doi:10.1016/j.joule.2024.11.011. URL https://doi.org/10.1016/j.joule.2024. 2852
11.011. 2853
David P. Cadogan, Christina Withrow, John Keller, and Barmac K. Taleghani. Develop- 2854
ment, design, and testing of PowerSphere multifunctional ultraviolet-rigidizable inflatable 2855
structures. Journal of Spacecraft and Rockets, 43(5):1049–1056, 2006b. doi:10.2514/1.3360. 2856
URL https://doi.org/10.2514/1.3360. 2857
Edward J. Simburger, James H. Matsumoto, Thomas W. Giants, Alexander Garcia, Simon 2858
Liu, Suraj P. Rawal, Alan R. Perry, Craig H. Marshall, John K. Lin, Stephen E. Scar- 2859
borough, Henry B. Curtis, Mike Piszczor, Thomas W. Kerslake, Todd T. Peterson, and 2860
David A. Scheiman. Thin-film technology development for the PowerSphere. Materials 2861
Science and Engineering: B, 116(3):265–272, 2005. doi:10.1016/j.mseb.2004.09.035. URL 2862
https://doi.org/10.1016/j.mseb.2004.09.035. 2863
Henry Curtis, Mike Piszczor, Thomas W. Kerslake, Todd T. Peterson, David A. Scheiman, 2864
Edward J. Simburger, Thomas W. Giants, James H. Matsumoto, Alexander Garcia, Si- 2865
mon H. Liu, John K. Lin, Stephen E. Scarborough, Daniel J. Gleeson, Suraj P. Rawal, 2866
Alan R. Perry, and Craig H. Marshall. Thermal cycle testing of the PowerSphere engi- 2867
neering development unit. In Proceedings of the 19th Space Photovoltaic Research and 2868
Technology Conference, 2007. URL https://ntrs.nasa.gov/citations/20090022302. 2869
NTRS 20090022302. Contract NAS3-01115. 2870
Kneev Sharma and Annukka Santasalo-Aarnio. Energy storage systems for space applica- 2871
tions. Journal of Energy Storage, 120:117131, 2025. doi:10.1016/j.est.2025.117131. URL 2872
https://doi.org/10.1016/j.est.2025.117131. 2873
Jonathan W. Arenberg, John Flynn, Allan Cohen, Robert Lynch, and John Cooper. Sta- 2874
tus of the JWST sunshield and spacecraft. In Proc. SPIE 9904, Space Telescopes and 2875
Instrumentation 2016: Optical, Infrared, and Millimeter Wave, page 990405. SPIE, 2016. 2876
doi:10.1117/12.2234481. URL https://doi.org/10.1117/12.2234481. 2877
Hyunsu Kim, Kevin Cheung, Raymond C. Y. Auyeung, David E. Wilson, Kristin M. Chari- 2878
par, Alberto Piqué, and Nicholas A. Charipar. VO2-based switchable radiator for space- 2879
craft thermal control. Scientific Reports, 9:11329, 2019. doi:10.1038/s41598-019-47572-z. 2880
URL https://doi.org/10.1038/s41598-019-47572-z. 2881
Almamoun Hendaoui, Nath Emond, Mohamed Chaker, and Emile Haddad. VO2-based 2882
smart coatings with improved emittance-switching properties for an energy-efficient near 2883
room-temperature thermal control of spacecrafts. Solar Energy Materials and Solar Cells, 2884
117:494–498, 2013. doi:10.1016/j.solmat.2013.07.023. URL https://doi.org/10.1016/ 2885
j.solmat.2013.07.023. 2886
Yury F. Maydanik. Loop heat pipes. Applied Thermal Engineering, 25(5–6):635–657, 2887
2005. doi:10.1016/j.applthermaleng.2004.07.010. URL https://doi.org/10.1016/j. 2888
applthermaleng.2004.07.010. 2889
Bogdan Marian Diaconu, Mihai Cruceru, and Lucica Anghelescu. Phase change materials in 2890
space systems: Fundamental applications, materials and special requirements—a review. 2891
Acta Astronautica, 216:163–213, 2024. doi:10.1016/j.actaastro.2023.12.040. URL https: 2892
//doi.org/10.1016/j.actaastro.2023.12.040. 2893
Federica Angeletti et al. Attitude dynamics and control of a large flexible space struc- 2894
ture by means of a minimum complexity model. Acta Astronautica, 200, 2022. 2895
doi:10.1016/j.actaastro.2022.05.047. URL https://doi.org/10.1016/j.actaastro. 2896
2022.05.047. 2897
Gabriele M. T. D’Eleuterio and Peter C. Hughes. Dynamics of gyroelastic continua. Journal 2898
of Applied Mechanics, 51(2):415–422, 1984. doi:10.1115/1.3167634. URL https://doi. 2899
org/10.1115/1.3167634. 2900
Gabriele M. T. D’Eleuterio and Peter C. Hughes. Modal parameter analysis of gyroelastic 2901
continua. Journal of Applied Mechanics, 53(4):918, 1986. doi:10.1115/1.3171881. URL 2902
https://doi.org/10.1115/1.3171881. 2903
Gabriele M. T. D’Eleuterio and Peter C. Hughes. Dynamics of gyroelastic spacecraft. Journal 2904
of Guidance, Control, and Dynamics, 10(4):401–405, 1987. doi:10.2514/3.20231. URL 2905
https://doi.org/10.2514/3.20231. 2906
Christopher J. Damaren and Gabriele M. T. D’Eleuterio. Optimal control of large space 2907
structures using distributed gyricity. Journal of Guidance, Control, and Dynamics, 12(5): 2908
723–731, 1989. doi:10.2514/3.20467. URL https://doi.org/10.2514/3.20467. 2909
Pedro Rocha Cachim, Will Kraus, Pedro Lourenço, Rodrigo Ventura, and Zachary 2910
Manchester. Optimal attitude control of large flexible space structures with 2911
distributed momentum actuators. In 2025 IEEE Aerospace Conference, 2025. 2912
doi:10.1109/aero63441.2025.11068424. URL https://doi.org/10.1109/aero63441. 2913
2025.11068424. arXiv:2410.07376. 2914
J. M. Picone, A. E. Hedin, D. P. Drob, and A. C. Aikin. NRLMSISE-00 empirical model 2915
of the atmosphere: Statistical comparisons and scientific issues. Journal of Geophysical 2916
Research: Space Physics, 107(A12):1468, 2002. doi:10.1029/2002JA009430. URL https: 2917
//doi.org/10.1029/2002JA009430. 2918
Yifan Jiang, Jun Zhang, Peng Tian, Tengfei Liang, Zhihui Li, and Dongsheng Wen. Aero- 2919
dynamic drag analysis and reduction strategy for satellites in very low Earth orbit. 2920
Aerospace Science and Technology, 132:108077, 2023. doi:10.1016/j.ast.2022.108077. URL 2921
https://doi.org/10.1016/j.ast.2022.108077. 2922
Tommaso Andreussi, Enrico Ferrato, et al. A review of air-breathing electric propul- 2923
sion: From mission studies to technology verification. Journal of Electric Propul- 2924
sion, 2:24, 2022. doi:10.1007/s44205-022-00024-9. URL https://doi.org/10.1007/ 2925
s44205-022-00024-9. 2926
Lee H. Sentman. Free molecule flow theory and its application to the determination of aero- 2927
dynamic forces. LMSC Technical Report, (LMSC-448514), 1961. doi:10.21236/ad0265409. 2928
URL https://doi.org/10.21236/ad0265409. 2929
Kenneth Moe and Mildred M. Moe. Gas-surface interactions and satellite drag coefficients. 2930
Planetary and Space Science, 53(8):793–801, 2005. doi:10.1016/j.pss.2005.03.005. URL 2931
https://doi.org/10.1016/j.pss.2005.03.005. 2932
Manuel Stein and John M. Hedgepeth. Analysis of partly wrinkled membranes. Technical 2933
Report TN D-813, NASA, 1961. 2934
D. G. Roddeman, J. Drukker, C. W. J. Oomens, and J. D. Janssen. The wrinkling 2935
of thin membranes: Part I–theory. Journal of Applied Mechanics, 54:884–887, 1987. 2936
doi:10.1115/1.3173133. URL https://doi.org/10.1115/1.3173133. 2937
H. Norman Abramson. The Dynamic Behavior of Liquids in Moving Containers. Number 2938
SP-106. NASA, 1966. 2939
Tristan Leclercq and Emmanuel de Langre. Vortex-induced vibrations of cylin- 2940
ders bent by the flow. Journal of Fluids and Structures, 80:77–93, 2018. 2941
doi:10.1016/j.jfluidstructs.2018.03.008. URL https://doi.org/10.1016/j. 2942
jfluidstructs.2018.03.008. 2943
NASA. In-space servicing, assembly, and manufacturing (ISAM) state of play—2025 edition. 2944
Technical Report NASA/TM-20250008988, NASA Space Technology Mission Directorate, 2945
2025. 2946
Wenjiang Li, Li Zhong, Weijun Zhu, Zhiyou Xu, Qiang Tang, and Wei Zhan. A survey 2947
of space robotic technologies for on-orbit assembly. Space: Science & Technology, 2022: 2948
9849170, 2022c. doi:10.34133/2022/9849170. URL https://doi.org/10.34133/2022/ 2949
9849170. 2950
William Doggett et al. NASA puts in-space assembly robots to the test 2951
(CIRAS/TALISMAN/SAMURAI/NINJAR). Technical report, NASA Langley Research 2952
Center, 2018. 2953
Mathieu Rognant et al. Autonomous assembly of large structures in space (PULSAR 2954
project). In 8th European Conference for Aeronautics and Space Sciences (EUCASS), 2955
2019. 2956
Aadarsh Nair et al. Design engineering a walking robotic manipulator for in-space assembly 2957
missions (E-Walker). Frontiers in Robotics and AI, 9, 2022. doi:10.3389/frobt.2022.995813. 2958
URL https://doi.org/10.3389/frobt.2022.995813. 2959
Aadarsh Nair et al. The new era of walking manipulators in space: Feasibility 2960
and operational assessment of assembling a 25 m LAST in orbit. Acta Astronau- 2961
tica, 2024. doi:10.1016/j.actaastro.2024.10.002. URL https://doi.org/10.1016/j. 2962
actaastro.2024.10.002. 2963
Shuai Liu, Enyang Zhang, Zhenbang Xu, and Jingxu Zhang. Design of docking inter- 2964
faces for on-orbit assembly of large structures in space. Sensors, 24(20):6534, 2024. 2965
doi:10.3390/s24206534. URL https://doi.org/10.3390/s24206534. 2966
Robert E. Skelton and Mauricio C. de Oliveira. Tensegrity Systems. Springer, 2009. 2967
doi:10.1007/978-0-387-74242-7. URL https://doi.org/10.1007/978-0-387-74242-7. 2968
Andrew P. Sabelhaus, Jonathan Bruce, Ken Caluwaerts, et al. System design and locomotion 2969
of SUPERball, an untethered tensegrity robot. In IEEE International Conference on 2970
Robotics and Automation (ICRA), 2015. doi:10.1109/icra.2015.7139590. URL https: 2971
//doi.org/10.1109/icra.2015.7139590. ICRA 2015. 2972
Juan M. Fernandez, Vaios J. Lappas, and Andrew J. Daton-Lovett. Completely stripped 2973
solar sail concept using bi-stable reeled composite booms. Acta Astronautica, 69: 2974
78–85, 2014. doi:10.1016/j.actaastro.2011.02.015. URL https://doi.org/10.1016/j. 2975
actaastro.2011.02.015. 2976
📝 About this HTML version
This HTML document was automatically generated from the PDF. Some formatting, figures, or mathematical notation may not be perfectly preserved. For the authoritative version, please refer to the PDF.